![]()
 Docente: Prof. Mauro De Berardis
Docente: Prof. Mauro De Berardis
Lavori eseguiti dagli alunni della classe Quinta B TIEN IPSIA Teramo
Coordinamento: Prof. Mauro De Berardis, Prof. Loreto Giovannucci
Consolle didattica 
![]()
![]()
Lavoro eseguito dall'alunno Marco Di Casmirro
![]()
![]()
La consolle didattica, oggetto di questa tesina, è stata progettata e realizzata durante lo stage aziendale di 120 ore, previsto nell'ambito del corso di formazione per "Tecnico dell'automazione industriale", che parte della classe VB TIEN ha svolto presso la Ditta Elital srl dell'Aquila.
La consolle serve per provare circuiti digitali tramite una basetta mille fori, di dimensioni ridotte, sulla quale può essere montato il circuito digitale da provare. Sulla consolle c’è un’alimentazione di riferimento di 5 volt che permette di provare esclusivamente circuiti utilizzanti componenti TTL: tale valore lo si può trovare all’uscita degli interruttori e pulsanti, ma anche dalle diverse boccole che sono state messe appositamente per l’alimentazione della mille fori.
Oltre all’alimentazione abbiamo messo anche dei display e dei led per la visualizzazione binaria, e dei led per verificare se c’è la presenza di un segnale all’ingresso delle diverse boccole di entrata. Non poteva mancare un multivibratore astabile che è indispensabile nella realizzazione di piccoli circuiti: ad esempio per generare il clock necessario per fare commutare i flip-flop.
Il progetto si è sviluppato nelle seguenti fasi:
| Analisi delle specifiche iniziali | |
| Progetto del lay-out di foratura del pannello frontale della consolle | |
| Stampa serigrafica del pannello | |
| Progetto dei circuiti elementari | |
| Progetto dei PCB | |
| Stampa dei PCB | |
| Montaggio dei componenti | |
| Assemblaggio e collaudo |
Di seguito, su consiglio del Prof. De
Berardis, riporto lo schema elettrico di alcuni circuiti
significativi realizzati con il software  e in
allegato i PCB originali utilizzati durante lo
svolgimento del lavoro.
e in
allegato i PCB originali utilizzati durante lo
svolgimento del lavoro.
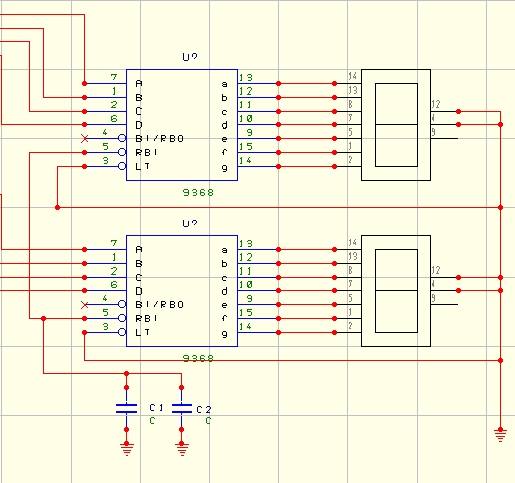
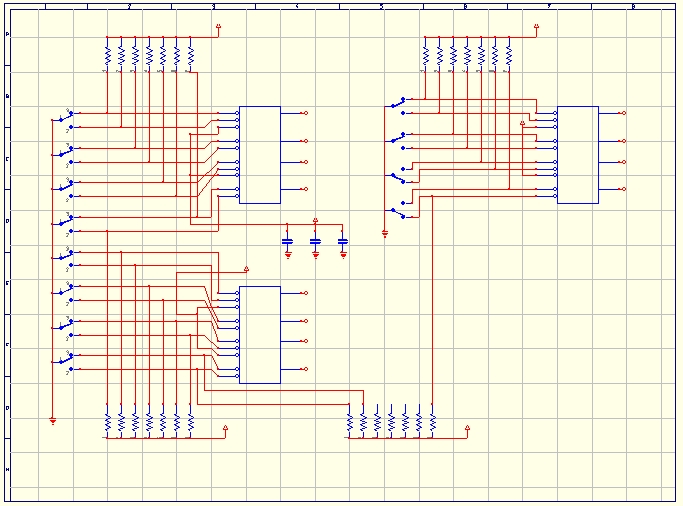
decoder e display

circuito antirimbalzo
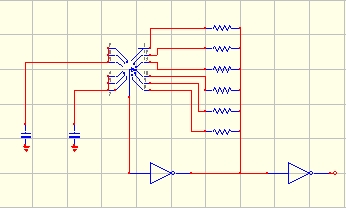
multivibratore astabile
I circuiti stampati utilizzati nella realizzazione del tester, sono allegati alla tesina
![]() Telecomunicazioni,
Elettronica e applicazioni
Telecomunicazioni,
Elettronica e applicazioni
La consolle realizzata durante lo stage, serve per eseguire prove e misure su segnali digitali.
Attualmente anche nelle Telecomunicazioni si è imposta la necessità di dover trasferire da un punto all’atro non soltanto delle informazioni analogiche, ma soprattutto delle informazioni numeriche espresse in forma digitale.
LA MODULAZIONE DEL SEGNALE
Nelle telecomunicazioni il segnale, dovendo attraversare uno spazio, ossia la distanza che separa il trasmettitore dal ricevitore, dovrà essere necessariamente manipolato per diverse ragioni:
- renderlo idoneo a superare la resistenza del mezzo, per consentire una trasmissione efficiente
- renderlo compatibile con il mezzo trasmissivo
- renderlo mescolabile con altri segnali senza perderne la sua identità.
Questa manipolazione, comune a tutti i tipi di telecomunicazione, viene generalmente definita modulazione.
Esistono vari tipi di modulazione a seconda:
- del campo d’utilizzo (telegrafia, telefonia ecc.)
- del tipo di segnale da manipolare (analogico, digitale)
- del mezzo trasmissivo (cavo, etere, fibra ottica ecc.).
Nel processo della modulazione si possono distinguere pertanto due segnali:
- un segnale detto portante che ha la funzione di trasportare o di traslare il segnale elettrico che rappresenta l’informazione attraverso il mezzo trasmissivo, nelle migliori condizioni e affidabilità
- un segnale detto modulante che contiene l’informazione vera e propria, ma che non possiede le caratteristiche necessarie per essere trasmesso così com’è, in quanto non si avrebbero le garanzie d’affidabilità richieste dall’apparecchio ricevente.
- L’insieme di questi due segnali fatti interagire fra di loro con il processo della modulazione costituisce il:
- segnale modulato che contiene l’informazione mescolata al segnale portante, ciò garantisce gli scopi di ottenere un’efficiente trasmissione nel mezzo e un’efficiente ricezione.
Il processo della modulazione può essere classificato nei seguenti modi:
- in base al tipo di segnale portante utilizzato
- in base al tipo di segnale modulante che deve essere modulato.
Tipo di segnale portante – valutandone la sua natura, le tecniche di modulazione si possono dividere in:
| modulazione a portante continua; cosiddetta in quanto usa come portante un segnale continuo (generalmente costituito da un’onda sinusoidale) |
| modulazione a portante impulsiva; cosiddetta in quanto usa come portante un segnale discreto (generalmente costituito da un’onda quadra o impulsiva). |
Tipo di segnale modulante – valutandone la sua natura, le tecniche di modulazione si possono dividere in:
| modulazione analogica; cosiddetta in quanto un parametro della portante viene modificato in modo continuo dal segnale modulante |
| modulazione numerica; cosiddetta in quanto un parametro della portante viene modificato in modo discreto dal segnale modulante. |
| LA MODULAZIONE
DIGITALE: consiste nel far modulare dal
segnale informazione, di tipo digitale, una
portante di tipo sinusoidale. LA MODULAZIONE AD IMPULSI: consiste nel far modulare dal segnale informazione, di tipo analogico, una portante di tipo impulsivo. LA MODULAZIONE PCM: consiste nel trasformare il segnale informazione, di tipo analogico, in un equivalente segnale digitale; si tratta quindi di una modulazione un po’ particolare. |
LA MODULAZIONE DIGITALE
Quando l’informazione da trasmettere è rappresentata da un segnale binario, costituito da una sequenza di livelli logici 0 e 1, con esso si modula una portante, si ottiene una modulazione digitale. Il segnale binario spesso è ottenuto da un segnale analogico mediante campionamento, A/D e serializzazione dei bit di uscita.
Modulazioni con portanti armonica
Se la portante è di tipo armonico, i parametri che possono essere variati sono, come per le modulazioni analogiche, ampiezza, frequenza e fase. Si ottengono così le modulazioni ASK, FSK, PSK,
Modulazione a variazione di ampiezza (ASK: Amplitude Shift Keying). In questo tipo di modulazione l’ampiezza A della portante armonica di pulsazione Wc viene modulata da un segnale Vm(t) che può assumere due valori corrispondenti ai livelli logici 0 e 1. Pertanto l’ampiezza del segnale modulato varierà fra due valori distinti associati ai suddetti livelli logici.
Generalmente questo tipo di modulazione viene realizzato in modo che l’ampiezza del segnale modulato assuma un valore nullo in corrispondenza del livello logico 0 (stato off) e viceversa un valore diverso da 0 in corrispondenza del livello logico 1 (stato on). In questo caso la tecnica di modulazione viene più propriamente indicata come OOK (On Off keyeing). Il segnale modulato può allora essere espresso analiticamente nella forma
V (t)=Avm(t) cos Wct
Dove Vm (t) vale 0 o 1.
Il segnale modulante digitale illustrato in figura 7.10a rappresenta la sequenza binaria 101101001. In figura 7.10b è raffigurato il corrispondente segnale modulato con tecnica OOK; si noti che ciascuna cifra binaria (bit) ha una durata costante indicata con T; pertanto l’informazione viene trasmessa con velocità di 1/T bit/s.
Lo spettro di frequenza del segnale OOK dipende ovviamente dalla particolare sequenza binaria da trasmettere. In fig. 7.11b è rappresentata lo spettro nel caso particolare di un segnale costituito da una sequenza di livello 0 e 1 alternanti (ONDE QUADRE). Si può osservare che, se lo spettro del segnale digitale originale (segnale banda base) ha una larghezza di banda limitata B (questa limitazione può essere ottenuta mediante filtraggio del segnale digitale stesso), per effetto della molteplicazione per A cos Wct, esso viene traslato alla frequenza fc. Sono presenti come per la modulazione AM analogica, le bande laterali delimitate da fc – B e fc + B cosicchè la larghezza di banda del segnale da trasmettere è Bt=2B.
![]() Matematica
Matematica
GRAFICI DELLE FUNZIONI GONIOMETRICHE
1) Grafico della funzione:Y=cos(X).
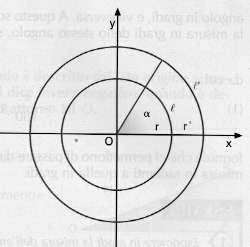
Si ricorda che si chiama angolo radiante l'angolo al centro di una circonferenza di raggio arbitrario, che sottende un arco di lunghezza eguale al suo raggio.
e che esiste la seguente corrispondenza tra gradi e radianti:
| gradi | 0 | 30 | 45 | 60 | 90 | 180 | 270 | 360 |
| radianti | 0 | p /6 | p /4 | p /3 | p /2 | p | 3p /2 | 2p |
Indicando con X la misura in radianti di un angolo orientato e con Y il corrispondente valore del seno, sappiamo che la funzione Y=senX èdefinita per ogni valore della X. Inoltre, la funzione "seno" è una funzione periodica di periodo 2p , e quindi per studiare l’andamento del suo grafico basta limitarsi a considerare soltanto i valori che essa assume per X variabile nell’intervallo (0,2p ).
A tale scopo, tracciamo sul piano un sistema d’assi cartesiani ortogonali Oxy e fissiamo un segmento U come unità di misura. Sull’asse X prendiamo il segmento, corrispondente all’intervallo (0,2p ), di misura 2p , e poi segnano i punti di ascissa X=p /2, X=p , X=3p /2.
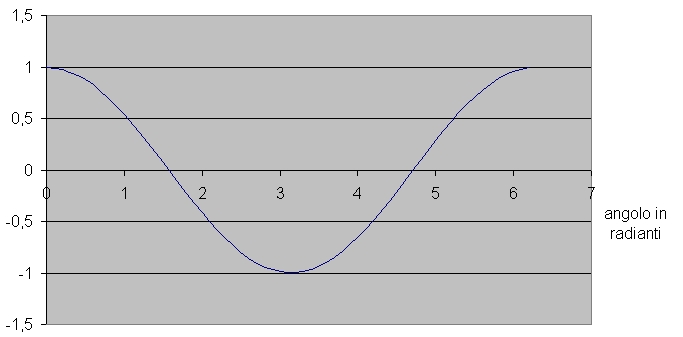
La funzione y=cos(x) realizzata con ![]()
SEGNALI PERIODICI E COMPONENTI ARMONICHE
Spesso in elettronica si fa riferimento a segnali del y=cos(x). Raramente, però, i segnali che si incontrano in Elettronica sono ideali; essi presentano generalmente un andamento sinusoidale (o cosenusoidale) con più o meno lievi deformazioni. Inoltre in moltissime applicazioni i segnali presentano andamenti completamente differenti da quello sinusoidale. Si può comunque affermare, grazie al TEOREMA DI FOURIER, che tutti i segnali periodici, con andamento qualsiasi, possono essere considerati come il risultato della sovrapposizione di tanti segnali sinusoidali di opportune ampiezza e frequenza e opportunamente sfasati fra di loro.
Secondo il Teorema di Fourier, una funzione periodica f (t) di periodo T è esprimibile con una serie del tipo:
f (t) = A0 + A1 sen (w t + j 1 ) + A2 sen (2w +j 2 ) + A3 sen (3w t + j 3)
ovvero può essere considerata come la somma di un termine costante, pari al valore medio della funzione di un periodo, e di infinite sinusoidi, delle quali la prima ha frequenza f= w /2p =1/T e le successive hanno frequenze multiple di f. La componente di frequenza f costituisce la componente fondamentale mentre le altre sono componenti armoniche.
![]() Inglese
Inglese
The basic building block incorporated in sequential circuits is the flip-flop. There are two classes of circuits based on the flip-flop which are registers and counters.
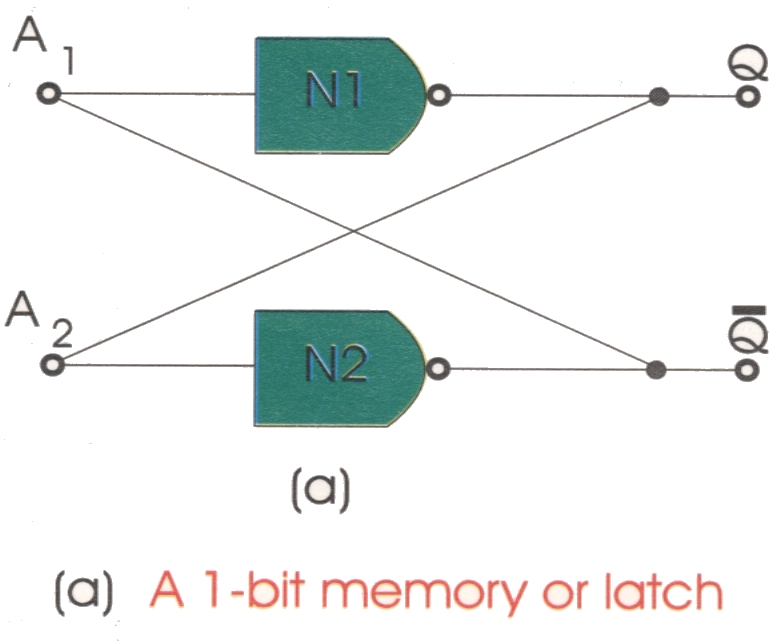
fig. 1 1-bit storage cell
The basic digital memory circuit is obtained by cross-coupling two NOT circuits Nl and N2 (single-input NAND gates) in the manner shown in Figure 1. The output of each gate is connected to the input of the other, and this feedback combination is called a latch.
The most important property of the latch is that it can exist in one of two stable states, either Q = 1 (Q = 0), called the 1 state, or Q = 0 (Q=1),referred to as the 0 state. The existence of these stable states is consistent with the interconnections shown in Figure 1a.
For example, if the output of Nl is Q = 1, so also is A2, the input to N2. This inverter then has the state 0 at its output Q. Since Q is tied to A1, then the input of N1 is 0, and the corresponding output is Q = 1. This result confirms our original assumption that Q = 1.
A similar argument leads to the conclusion that Q = 0; Q = 1 is also a possible state. It is rea- dily verified that the situation in which both outputs are in the same state (both 1 or both 0) is not consistent with the interconnection.
Traduzione
Il blocco base incorporato in un circuito sequenziale è il flip–flop. Ci sono due classi di circuiti basati sui flip-flop che sono i registri e i contatori.
Cella di memoria a 1 bit.
Il circuito base della memoria digitale è ottenuto dall’incrocio o accoppiamento di due circuiti NOT N1 ed N2 ( porte NAND a entrata singola ) nella maniera rappresentata dalla fig. 1. L’uscita di ogni porta è connessa all’entrata delle altre, questa combinazione di retrazione è chiamata latch. La proprietà più importante del latch è che può esistere in uno o due stati stabili, sia Q=1 (Q=0) chiamato stato 1, o Q=0 (Q=1), chiamato stato 0. L’esistenza di questi stati stabili consiste con l’interconnessione rappresentata nella fig. 1a. Per esempio, se l’uscita dell’ N1 è Q=1, anche così è A2, l’entrata a N2. Questo invertitore allora ha lo stato 0 alla sua uscita Q. Poiché Q è collegato ad A 1 allora, l’entrata di N1 è 0, e l’uscita corrispondente è Q=1.Questo risultato conferma la nostra originale ipotesi quella di Q=1. Un argomento simile porta alla conclusione che Q=0; Q=1 e anche uno stato possibile. Prontamente verificabile che la situazione in cui entrambe le uscite sono allo stesso stato (entrambe 1 o entrambe 0) e non compatibile con l’interconnessione.
-
![]()