 Docente: Prof.
Mauro De Berardis
Docente: Prof.
Mauro De Berardis ![]() Docente: Prof.
Mauro De Berardis
Docente: Prof.
Mauro De Berardis
Lavori eseguiti dagli alunni della classe Quinta B TIEN IPSIA Teramo
Coordinamento: Prof. Mauro De Berardis, Prof. Loreto Giovannucci
Controllo di
temperatura on/off 
![]()
Lavoro eseguito dall'alunno Tulini Manuel

![]()
L'obiettivo che si vuole raggiungere è quello di controllare la temperatura di un ambiente attivando un elemento riscaldatore quando la temperatura scende al di sotto di un valore di soglia.
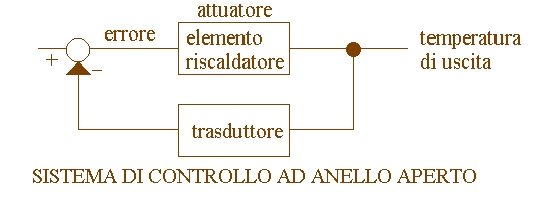
Si sceglie di utilizzare una regolazione ad anello chiuso di tipo ON-OFF in cui è possibile solo il funzionamento (ON) oppure l'interruzione (OFF) del dispositivo (elemento riscaldatore) che provoca la variazione della grandezza (temperatura) da controllare.
Una eventuale variazione della grandezza di uscita viene riportata in ingresso e confrontata con il valore prefissato (temperatura di riferimento).
Se la temperatura di uscita è inferiore a quella di riferimento viene attivato l'elemento riscaldatore.
Come trasduttore si sceglie di utilizzare il circuito AD 590, per rilevare la differenza tra temperatura di riferimento e temperatura dell'ambiente si utilizza un comparatore, per attivare l'elemento riscaldatore si utilizza un relè.
Fissando il valore di soglia a 25°C si propone il seguente circuito:
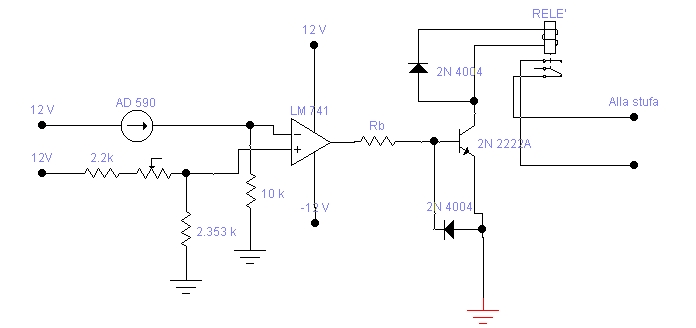
schema realizzato con![]()
Facendo riferimento ai Data sheet di Analogic Devices, risulta che l’AD 590 è un trasduttore integrato a 2 piedini che eroga una corrente di uscita proporzionale alla temperatura assoluta.
La corrente di uscita è di 1mA/K.
Poiché 00C corrisponde a 273.2K l'AD 590 eroga 273.2 m A a 00C e 298.2 m A a 250C.
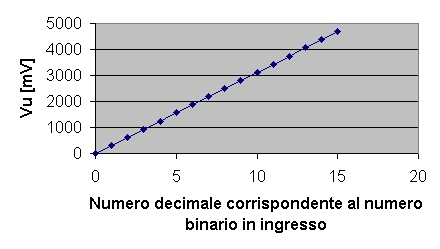
Ponendo in serie all'AD 590 una R di 10 KW , si ottiene ai capi di essa una tensione di 10 mV/K: pertanto, quando l'AD 590 rileva una temperatura di 100C (283.2K) ai capi di R si rileva una tensione:
V=1 m A/K*283.2K*10 KW =2.832 V
quando l'AD 590 rileva una temperatura di 200C (293.2K) ai capi di R si rileva una tensione:
V =l m A/K*293,2K*10 KW =2.932V
Quando la temperatura raggiunge i 250C (298.2K) ai capi di R si rileva una tensione:
V=l m A/K*2982K*10 KW =2.982V
e così via come risulta dalla tabella
realizzata con ![]()
° C |
KELVIN |
V |
0 |
273,2 |
2.732 |
1 |
274,2 |
2.742 |
2 |
275,2 |
2.752 |
3 |
276,2 |
2.762 |
4 |
277,2 |
2.772 |
5 |
278,2 |
2.782 |
6 |
279,2 |
2.792 |
7 |
280,2 |
2.802 |
8 |
281,2 |
2.812 |
9 |
282,2 |
2.822 |
10 |
283,2 |
2.832 |
15 |
288,2 |
2.882 |
20 |
293,2 |
2.932 |
25 |
298,2 |
2.982 |
26 |
299,2 |
2.992 |
27 |
300,2 |
3.002 |
28 |
301,2 |
3.012 |
29 |
302,2 |
3.022 |
30 |
303,2 |
3.032 |
35 |
308,2 |
3.082 |
36 |
309,2 |
3.092 |
37 |
310,2 |
3.102 |
38 |
311,2 |
3.112 |
39 |
312,2 |
3.122 |
40 |
313,2 |
3.132 |
Poiché si vuole attivare l'elemento riscaldatore quando la temperatura è inferiore ai 250C, basta comparare la tensione sul morsetto invertente V (-) con una tensione di riferimento di 2.982 V sul morsetto non invertente.
Tale tensione di riferimento si ottiene con il partitore R1-R2:
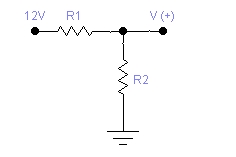
In pratica per ottenere un valore preciso si può utilizzare in serie ad R2 un potenziometro di precisione.
Il comparatore commuta tra i valori Vu =+12 V e Vu =-12V commuta a +12 V quando V (+) è inferiore a V (-) cioè quando temperatura è inferiore a 200C, commuta a -120C nei caso opposto.
Nel 1^ caso (Vu =10 V) il transistor satura ed eccita la bobina del relè che attiva l'elemento riscaldatore ad esempio una stufa elettrica, nel 20 caso (Vu -10 V) il transistor viene interdetto e la bobina del relè viene disercitata:
V (+) |
Temperatura Ambiente |
Vu | Azione ATTUATORE |
| > V (-) | >20°C | 10 V | ON |
| < V (-) | <20°C | -10 V | OFF |
Il diodo posto in antiparallelo alla bobina del relè serve per evitare sovratensioni pericolose sul collettore del BJT nella commutazione dalla SATURAZIONE all'INTERDIZIONE.
Il relè per essere eccitato necessita di una corrente Il =12/300=40mA che l'operazionale non è in grado di erogare (in genere la corrente di uscita di un operazionale è limitata ai 5-10 mA).
Per questo motivo si inserisce un BJT.
Facendo riferimento al Data sheet dello 2N 222A, per portare in saturazione il 2N 222A è necessaria una Ib>Icc/hfemin cioè una Ib> 40mA/75 >0.53mA.
Scegliendo una Ib = 1mA si ottiene
Rb = (Vu-Vbe) /Ib =10-0.8/1* 10-3 = 9.2 KW
In pratica si può scegliere il valore commerciale 9.1KW .
Il diodo inserito tra base ed emettitore serve per proteggere la giunzione BE quando l'uscita del comparatore commuta a –10 V.
Il funzionamento del circuito può essere simulato per mezzo di WORKBENCH, utilizzando ai posto del relè un diodo LED e al posto dell'AD 590, una tensione di riferimento confrontata una volta al valore di T =100C e una volta al valore di T =300C.
Il circuito così progettato presenta l'inconveniente di utilizzare un comparatore molto semplice ed economico ma anche piuttosto lento nella commutazione e sensibile ai disturbi presenti ad uno o all'altro degli ingressi.
Al suo posto si può utilizzare un comparatore di precisione integrato LM311.
A questo punto si può collaudare praticamente su bread board il circuito progettato, utilizzando come elemento riscaldatore una stufetta elettrica.
La risposta del controllo di temperatura così realizzato è del tipo:
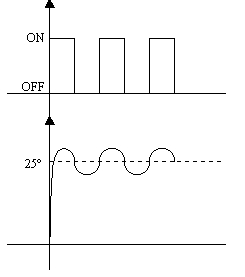
ed evidenzia come un controllo di tipo ON/OFF sia abbastanza grossolano e non consenta una precisione accurata.
Per ottenere una precisione più elevata, si può ricorrere ad un controllo di tipo PD, cioè di tipo professionale derivativo, nel quale il comando dell'attuatore è proporzionale alla differenza tra temperatura di riferimento e temperatura misurata e che tiene conto della velocità con la quale le variazioni di temperatura si verificano.
Un controllo ancora più raffinato è il controllo PID, che aggiunge rispetto al controllo di tipo PD, visto sopra un controllo di tipo integrale che tiene conto della somma di tutte le variazioni di temperatura.
Dopo una fase di oscillazione iniziale che segue la fase di riscaldamento rapida, la risposta tende a stabilizzarsi sul valore di riferimento.
Automazione di processi continui e servosistemi.
Un sistema ad anello chiuso, del tipo di quelli descritti, può essere schematizzato graficamente come in figura.
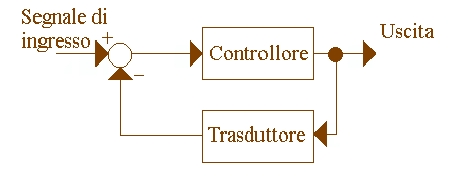
Dallo schema si vede che:
![]() Elettronica,
Telecomunicazioni e applicazioni
Elettronica,
Telecomunicazioni e applicazioni
I sistemi a microprocessore.
I sistemi di controllo a microprocessore fanno uso di un elaboratore o di un sistema a microprocessore dedicato per eseguire una serie di operazioni che, per la loro complessità, non possono essere svolte da un sistema analogico.
I sistemi di controllo gestiti da un elaboratore trovano applicazione nei processi di lavorazione industriale, nel controllo del traffico aereo e autostradale, nel puntamento delle antenne per la ricezione e la trasmissione delle informazioni via satellite, nei processi di produzione dell’energia elettrica, ecc.
In questi casi l’uso di un elaboratore è necessario a causa dell’elevato numero di variabili che il sistema deve controllare e dei numerosi e complessi che bisogna eseguire per poter intervenire in tempo reale sul processo.
I sistemi di controllo con microprocessore dedicato sono utilizzati in applicazioni meno complesse di quelle precedentemente citate: ad esempio in ambito domestico, nelle lavatrici e nella lavastoviglie, nei sistemi di allarmi, nelle automobili, ecc.
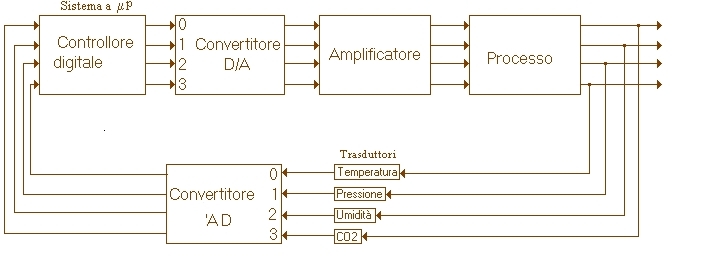
figura 1
Nella figura sopra è riportato lo schema a blocchi di un sistema di controllo gestito da un sistema a microprocessore.
Il circuito di reazione è costituito da più trasduttori e da un convertitore A/D a più ingressi il quale converte le grandezze analogiche in digitali affinché possano essere acquisite dall’elaboratore che, con un programma definito dall’utente, elabora i dati numerici corrispondenti ai segnali acquisiti e li confronta con i corrispondenti valori di riferimento, memorizzati in una apposita area di memoria ed introdotti dall’operatore tramite tastiera.
Il risultato del confronto svolto dal controllo digitale determina l’invio di opportuni segnali digitali ai convertitori D/A che li trasformano in segnali analogici affinché possano essere applicati agli amplificatori.
Questi ultimi, infine, generano i segnali che agiscono sul processo e consentono di far assumere alle variabili controllate i valori desiderati.
Il vantaggio evidente di un sistema di controllo gestito da un elaboratore consiste nella sua versatilità perché, variando il programma o alcune parti di esso in relazione alle esigenze specifiche, è possibile modificare rapidamente i parametri di controllo del processo senza dover intervenire sull’hardware.
Questo permette, oltre il potenziamento qualitativo delle possibili offerte, di interfacciare i controlli con altre strutture intelligenti, aumentando ancora le potenzialità del sistema ed espandendo cosi il sistema senza intaccarne il nucleo centrale.
In altri tipi di controlli industriali risulta impiegato il PLC, o Controllore a Logica Programmabile; questo permette di usufruire di un hardware standard, fornito dalle case costruttrici già completo, che può variare il suo funzionamento a seconda di come viene programmato.
Questo tipo di programmazione è però resa comprensibile agli impiantisti, secondo le loro conoscenze di progettazione di impianti elettrici, che quindi si trovano a dover tradurre un loro progetto elettrico in una serie di istruzioni che lo sostituiscono.
Colloquio tra un sistema di controllo e un computer centrale.
Quanto appena affermato, propone un problema: come mettere in comunicazione una struttura adibita a controllo del sistema (se pur computerizzata), con una struttura adibita ad elaborazioni generali, quali un Computer Centrale o un Personal Computer dedicato.
Esistono a questo proposito soluzioni già ampliamente collaudate ed addirittura standardizzate a livello internazionale.
Lo scopo di questo capitolo della tesina è quello di presentare gli standard di comunicazione più diffusi, commentarne il funzionamento ed, infine, analizzare un progetto di interfaccia da collegare al sistema a microprocessore, per poterlo mettere in comunicazione con l’esterno.
Comunicazione dati.
All’interno di una struttura a microprocessore, o, in generale, di un computer, le informazioni viaggiando in parallelo; si ha cioè un BUS dati, che può essere a 8 o a 16 (e ultimamente a 32) bit, che presenta il valore digitale di ciò che deve essere comunicato, in gergo denominato Byte.
Quando tale informazione deve essere portata al di fuori della struttura, per poter dialogare con una periferica o un altro computer, possono presentarsi possibilità diverse.
Il dato può rimanere digitale o parallelo: si dice che la comunicazione è parallela, e il tipo di connessione in uso è l’interfaccia Centronics.
Il dato viene spedito su una sola linea, e su un’altra viene ricevuto, sempre in modo digitale: si parla di comunicazione seriale, ed il tipo di connessione più diffuso è l’interfaccia RS.-232C.
Infine possono essere comunicati dati a lunga distanza, mediante linea telefonica; in questo caso la comunicazione è ancora di tipo seriale, però analogica, essendo trasmesso un segnale digitale modulato.
Arrivato a destinazione, il segnale verrà demodulato, per ottenere un dato digitale seriale.
Il tipo di connessione utilizzata si chiama MODEM (Modulatore-DEModulatore).
Tutti questi tipi di comunicazione, oltre a cambiare il tipo di connessione, rispondono anche a certi standard internazionali, che ne regolano, oltre al modo di connettersi, il protocollo di trasmissione.
Intanto occorre dire che, nella maggior parte dei casi, i caratteri trasmessi vengono forniti in codice ASCII (American Standard Code for Information Interchange); in pratica ogni numero binario, su sette bit, rappresenta un carattere, secondo la tabella riportata in appendice, diventata ormai di uso comune ed approvata come standard internazionale.
Comunicazione parallela Centronics.
La comunicazione parallela avviene, come si è detto, su un numero di linee pari alla lunghezza del byte che caratterizza il microprocessore utilizzato.
Per quanto riguarda l’interfaccia Centronics, in pratica l’unica utilizzata, viene impiegato un collettore a 36 poli del tipo amphelon (è la casa costruttrice che per prima ha prodotto tale tipo di connettore; come per la seriale si utilizza il tipo a 25 poli a vaschetta detto Cannon, dalla casa costruttrice che lo ha realizzato), dove si assegna il nome del segnale collegato su ogni pin.
Questa connessione viene spesso utilizzata per la connessione Computer-stampante.
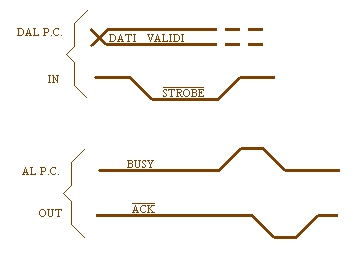
Il meccanismo di funzionamento, semplificato, viene descritto nella figura sottostante.
Il computer (supposto come controllore della comunicazione), manda i dati in parallelo, sincronizzati dal segnale di STROBE (attivo basso), a patto che la stampante (supposta la ricevente) sia pronta a riceverli, lasciando il segnale di BUSY basso.
Quest’ultimo verrà alzato quando la comunicazione non può avvenire, per esempio se il buffer della stampante è pieno.
Quando la stampante ha riconosciuto il carattere invia una conferma mediante il segnale ACK (attivo basso).
Esistono poi altre linee di controllo, il più delle volte non utilizzate dal computer che trasmette, come ad esempio:
-PE (Paper End). In uscita dalla stampante, comunica quando la carta è terminata.
-FAULT (ERRORE). In uscita dalla stampante, comunica errori di funzionamento.
Vediamo i pregi ed i difetti di questo tipo di interfaccia.
Innanzi tutto è veloce.
Infatti il dato viene comunicato in un solo colpo, un byte per volta; se l’informazione è composta da 10 caratteri, verranno mandati 10 byte in altrettante comunicazioni susseguenti.
Se si dovessero spedire gli stessi dati in seriale, occorrerebbe mandare 8 bit di seguito per 10 byte, quindi 80 comunicazioni, intervallate da spazi fra un byte e l’altro (come vedremo).
Per contro esiste però la necessità, per la parallela, di dover predisporre collegamenti a più cavi almeno 12, tenendo conto dei segnali della figura sottostante oltre la massa.
Infine, essendo il colloquio digitale a livello TTL (0-5 volt), può essere pericoloso, sia per i disturbi che si possono sommare agli stati logici, che per il livello di tensione; infatti un tragitto troppo lungo potrebbe abbassarne il valore, dovuto alla resistenza del cavo, e quindi rendere dubbio lo stato logico.
Questo impone distanze ridotte.
Comunicazione seriale.
Trasmettere un dato o un messaggio in modo seriale, può sembrare concettualmente difficile da capire; per entrare nell’ottica giusta possiamo paragonare questa trasmissione all’alfabeto morse: infatti ogni lettera viene inviata mediante linee e punti che si alternano nel tempo, uno dopo l’altro.
Un esempio visivo è invece riportato nella figura sottostante.
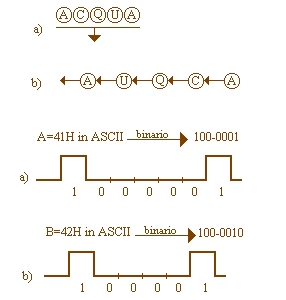
Supponiamo di avere a disposizione delle biglie, sulle quali sono stampate le lettere ed i numeri.
Se volessimo scrivere ACQUA, e trasmettere tale parola mediante le biglie potremmo mandare le stesse (5 per scrivere la parola) tutte insieme, in modo che arrivino a destinazione contemporaneamente e possa essere letta la parola in un colpo solo.
Oppure potrebbero essere inviate mediante un cunicolo, anche lungo, una per volta, senza paura che si scomponga la parola; in questo caso arrivano a destinazione in seriale, e chi legge la parola, deve aspettare l’arrivo dell’ultima, e comporre ACQUA.
Quindi si capisce che la stessa prima viene scomposta in lettere singole, inviate una per volta, e poi ricomposta all’arrivo.
È lo stesso procedimento che si ha per la trasmissione seriale dei dati.
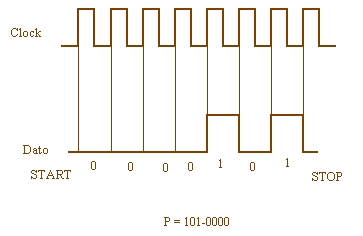
Supponiamo ad esempio di voler trasmettere la lettera A, come spiega l’esempio in figura sottostante.
In codice ASCII vale 41H, cioè 100-0001, e può essere trasmesso bit per bit, a partire dal più leggero ad intervalli regolari.
Sarà quindi inviato lo stato 1, poi lo 0, per cinque intervalli successivi, ed infine ancora 1.
Così per B, si otterrà l’esempio della figura sottostante.
Una delle grandezze fondamentali, che caratterizzano la trasmissione seriale, è la frequenza, espressa in bit/s o baud.
Conoscendo la frequenza, si stabilisce l’intervallo di tempo, o periodo, tra un bit e l’altro, e poter riconoscere il loro stato logico.
Occorre quindi che i 2 dispositivi, trasmettitore e ricevitore siano perfettamente sincronizzati, o meglio abbiano la stessa frequenza di campionamento.
Per ottenere un colloquio affidabile ci si affida a componenti di estrema precisione, che lavorano con frequenze ottenute impiegando dei quarzi, caratterizzati da una frequenza di oscillazione molto precisa.
Oppure, a volte viene inviato il clock di sincronismo su una linea affiancata a quella di trasmissione, in modo che il ricevitore utilizzi la stessa per interpretare la sequenza di stati.
Le frequenze standard di trasmissione sono spesso comuni per i diversi dispositivi, e vengono fornite elencate sotto la voce Baud Rate: 300, 600, 1200, 2400, 4800,9600,19200 sono le più diffuse.
Un'altra caratteristica importante è il livello di tensione, che rappresenta lo stato logico 0 o 1; nell’esempio delle figure precedenti, lo 0 era abbinato a 0 volt, e l’1 a + volt.
In pratica spesso lo zero è una tensione negativa – V, e l’1 una tensione positiva + V; per l’interfaccia RS-232C sono –12 V e +12 V.
Passiamo ad analizzare le più importanti interfaccie seriali, nella presentazione delle quali verranno fornite informazioni riguardanti altre caratteristiche generali.
Interfaccia seriale RS-232C.
Come abbiamo già avuto modo di spiegare, la trasmissione degli stati logici mediante interfaccia RS-232C (Recommended Standard 232 version C) avviene con cambi di tensione su livelli standard EIA (Electronics Industry Association), che abbiamo visto essere –12 V + 12 V.
Va detto innanzi tutto che la trasmissione seriale in generale può essere SINCRONA o ASINCRONA.
La prima utilizza un clock comune ai 2 moduli, ricevitore e trasmettitore, ed i dati vengono spediti in una serie unica, intervallata da segnali di sincronismo (SYNC).
La seconda, ben più utilizzata, vede i due moduli completamente indipendenti, e il sincronismo della trasmissione avviene mediante bit di controllo, detti START bit e STOP bit, che delimitano ciascun carattere.
Può essere aggiunto anche un bit che controlla la parità del carattere (stabilisce cioè se il numero dei bit ad 1 è pari o dispari).
In generale quindi, un carattere trasmesso in modo asincrono, può essere cosi composto:
-N. start bit = 1
-N. bit del carattere = 5 o 6 o 7 o 8
-N. bit di parità = esclusa, oppure 1 o 2
-N. stop bit = 1 o 1 +1/2 o 2
Lo stato di riposo viene assunto come 1 logico, quindi una trasmissione inizierà sempre con uno 0 identificato come start bit
Volendo trasmettere il carattere C (43H = 100-0011), su 7 bit e con 2 stop bit, si otterrà la sequenza di figura sottostante, dove si nota che lo stato logico del bit del carattere viene invertito.
Per quanto riguarda il bit di parità, si è detto che può essere escluso (no parity), come nel caso della figura sottostante, quindi non è presente; nel caso invece la parità sia presente, può essere pari (EVEN) o dispari (ODD).
Significa che il numero di bit a 1 dovrà essere pari nel primo caso e dispari nel secondo; il bit di parità, inviato prima dello stop, aggiusta tale numero, a seconda se la parità e attivata o meno.
Se, ad esempio, il carattere è C, con 3 bit a 1, e la parità è pari, il bit di parità sarà 1 (per far diventare 4, quindi pari, gli1) mentre se la parità è dispari, il bit di parità diventerà 0 (essendo 3, quindi dispari, gli 1).
Ritorniamo alle specifiche che caratterizzano l’interfaccia RS-232C.
Innanzi tutto il collegamento prevede un connettore standard a 25 poli, così detto a vaschetta.
Questa interfaccia è usata per un eventuale collegamento terminale-modem, essendo il tipo più completo, in cui vengono utilizzati la maggior parte dei segnali.
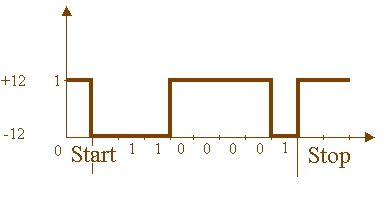
Tabella piedinatura RS-232C
| Pin | Segnale | Descrizione del segnale | Sorgente segnale | |
1 |
AA | PROTECTIVE GROUND | (schermo) | / |
2 |
BA | TRANSMITTED DATA | (TD) | TERMINALE |
3 |
BB | RECEIVED DATA | (RD) | MODEM |
4 |
CA | REQUEST TO SEND | (RTS) | TERMINALE |
5 |
CB | CLEAR TO SEND | (CTS) | MODEM |
6 |
CC | DATA SET READY | (DSR) | MODEM |
7 |
AB | SIGNAL GROUND | / | |
8 |
CF | DATA CARRIER DETECT | (DCD) | MODEM |
9 |
/ | |||
10 |
/ | |||
11 |
/ | |||
12 |
CI | HIGH SPEED INDICATOR | MODEM | |
| SCF | Oppure secondo DCD | |||
13 |
SBCB | Secondo CTS | MODEM | |
14 |
SBA | secondo TD | TERMINALE | |
15 |
DB | CLOCK TRASMITTER | (TC) | TERMINALE |
16 |
SBB | Secondo RD | MODEM | |
17 |
DD | CLOCK RECEIVER | (RC) | MODEM |
18 |
/ | |||
19 |
SCA | Secondo RTS | TERMINALE | |
20 |
CD | DATA TERMINAL READY | (DTR) | TERMINALE |
21 |
CG | SIGNAL QUALITY | MODEM | |
22 |
CE | RING INDICATOR | (RI) | MODEM |
23 |
CH/CI | DATA RATE SELECT | TERMINALE-MODEM | |
24 |
DA | CLOCK TRASMITTER ext. | (ETC) | TERMINALE |
25 |
![]() Matematica
Matematica
Riprendendo lo schema generale di un sistema a microprocessore di figura 1, è desiderabile che caratteristica di trasferimento del convertitore Ad e del convertitore A/D siano delle rette del tipo di quella rappresentata in figura (Conversione DA):
Equazione della retta
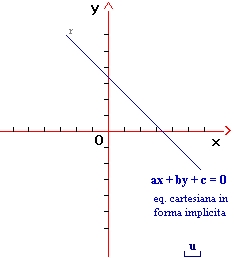
Retta passante per l'origine



Essendo m=sen (ß)/cos(ß)=tg (ß), dove ß rappresenta l'angolo orientato in senso antiorario formato dall'asse delle ascisse x con la retta, l'angolo ß può essere determinato applicando la formula ß=arctg(m)
![]() Inglese
Inglese
LM111/LM211/LM311 Voltage Comparator
General Description
The LM111, LM211 and LM311 are voltage comparators that have input currents nearly a thousand times lower than devices like the LM106 or LM710. They are also designed to operate over a wider range of supply voltages: from standard +/-15V op amp supplies down to the single 5V supply used for IC logic. Their output is compatible with RTL, DTL and TTL as well as MOS circuits. Further, they can drive lamps or relays, switching voltages up to 50V at currents as high as 50 mA.
Both ths inputs and the outputs of the LM111, LM211 or the LM311 can be isolated from system ground, and the output can drive loads referred to ground, the positive supply or the negative supply. Offset balancing and strobe capability are provided and outputs can be wire OR’ed. Although slower than the LM106 and LM710 (200 ns response time vs
40 ns) the devices are also much less prone to spurious oscillations. The LM111 has the same pin configuration as the LM106 and LM710. The LM211 is identical to the LM111, except that its performance is specified over a – 25°C to + 85°C temperature range instead of – 55°C to +125°C. The LM311 has a temperature range of O°C to + 70°C.
Features
Operates from single 5V supply Input current: 150 nA max. over temperature Offset current: 20 nA max. over temperature Differential input voltage range: +/-30V Power consumption: 135 mW at +/-15V
Traduzione
LM111/LM211/LM311 Comparatore di tensione
Descrizioni generali
Gli LM111,LM211 e LM 311 sono comparatori di tensione che hanno correnti di ingresso quasi a mille volte inferiori di quelli progettati LM106 o LM710 ci sono anche progetti che operano sopra una portata maggiore di tensione di scorta:
dallo standard +/-15 V amplificatore operazionale riserva sotto la tensione di riserva singola 5 V usata per IC logico.
La loro uscita è compatibile con RTL, DTL e TTL usati come circuiti MOS.
Essi possono guidare lumi o relè, contando tensioni sopra a 50 V alle correnti come 50mA.
Gli ingressi e le uscite degli LM111,LM211,LM311 possono essere isolati da sistema di terra, e può guidare tensioni ripetute alla terra, la riserva positiva o la riserva negativa.
L’offset bilanciato e la capacità dello strobe sono previsti e l’uscita può essere legata.
Sebbene l’LM106 e LM107 siano lenti (200ns come risposta contro i 40 ns) i dispositivi sono anche molto meno inclini alla falsa oscillazione.
L’LM111 ha la stessa piedinatura dell’LM106 e LM710.
L’LM211è identico all’LM111, esclude quella sua performance e specifica sopra a –25°C +85°C temperatura di allineamento invece di –55°C a +125°C.
L’LM311 ha una temperatura di allineamento da 0°C a +70°C.
Caratteristiche
Funzioni da solo 5V riserva corrente d’ingresso:150nA massimo sopra la temperatura di offset corrente: 20nA massimo sopra la temperatura differenziale del voltaggio d’ingresso +/- 30V potenza consumata: 135mV a +/- 15V.

![]()