![]()
 Docente: Prof. Mauro De Berardis
Docente: Prof. Mauro De Berardis
Lavori eseguiti dagli alunni della classe Quinta B TIEN IPSIA Teramo
Coordinamento: Prof. Mauro De Berardis, Prof. Loreto Giovannucci
Encoder 
![]()
![]()
Lavoro eseguito dall'alunno Silvio Panza

![]()
![]()
TRASDUTTORI DIGITALI (encoder). Esistono fondamentalmente tre tipi di trasduttori digitali di spostamento rotazionale (ma anche traslazionale): tachimetrico, incrementale, assoluto. Essi si differenziano principalmente per il segnale che forniscono in uscita.
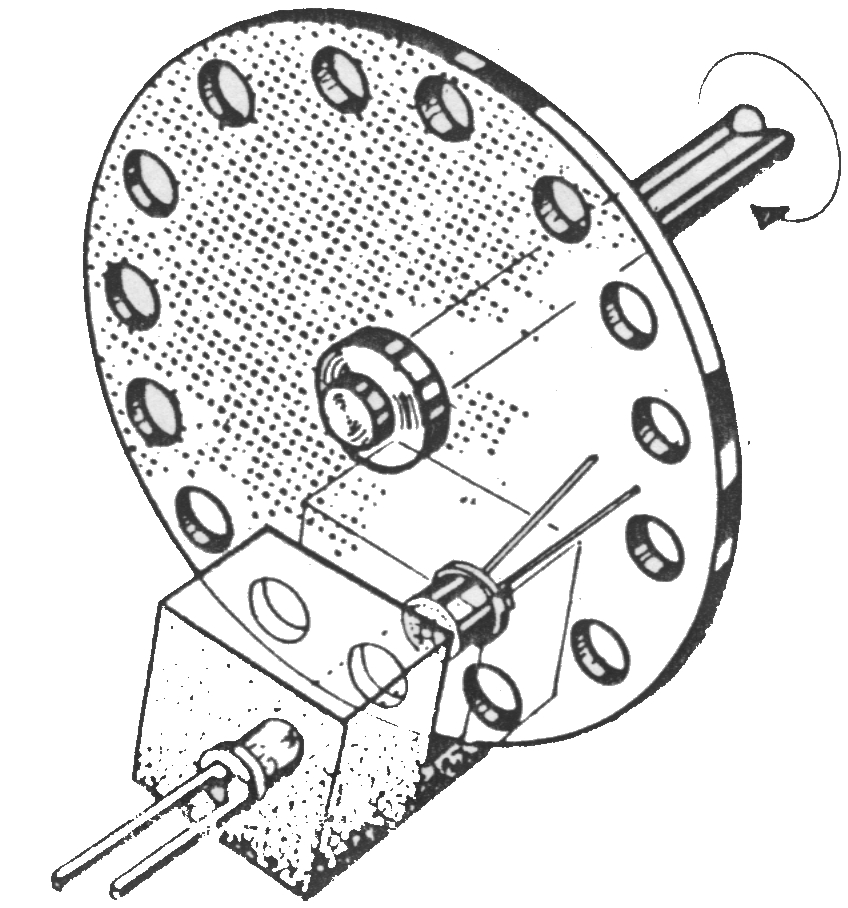
L’encoder tachimetrico è costituito essenzialmente da un disco forato, che ruota con il corpo di cui si vuole controllare la velocità, e da un generatore di segnale formato da un LED e un fotosensore allineati. La rotazione del disco fa sì che la luce emessa dal LED raggiunga il fotosensore quando uno dei fori si posiziona fra il LED e il fotosensore stessi. Il segnale di uscita generato dal fotosensore sarà pertanto un treno di impulsi, di frequenza proporzionale alla velocità di rotazione. Se il movimento avviene sempre nello stesso verso, un contatore digitale che conti gli impulsi è in grado di fornire l’entità dello spostamento rispetto ad una posizione di riferimento.
Naturalmente una rotazione in verso opposto, producendo impulsi uguali ai precedenti, causerebbe una lettura di posizione del tutto errata; per questo motivo il tachimetro digitale può essere usato solo per misure di spostamento angolare in situazioni in cui il movimento non si inverte. Per semplicità si è descitto l’encoder come costituito da un disco forato; in realtà invece viene realizzato generalmente con uno o più dischi trasparenti o riflettenti, su cui vengono prodotte con tecniche fotolitografiche tracce opache disposte lungo la circonferenza.
L’encoder incrementale illustrato schematicamente nella figura seguente elimina l’incoveniente sopra citato.
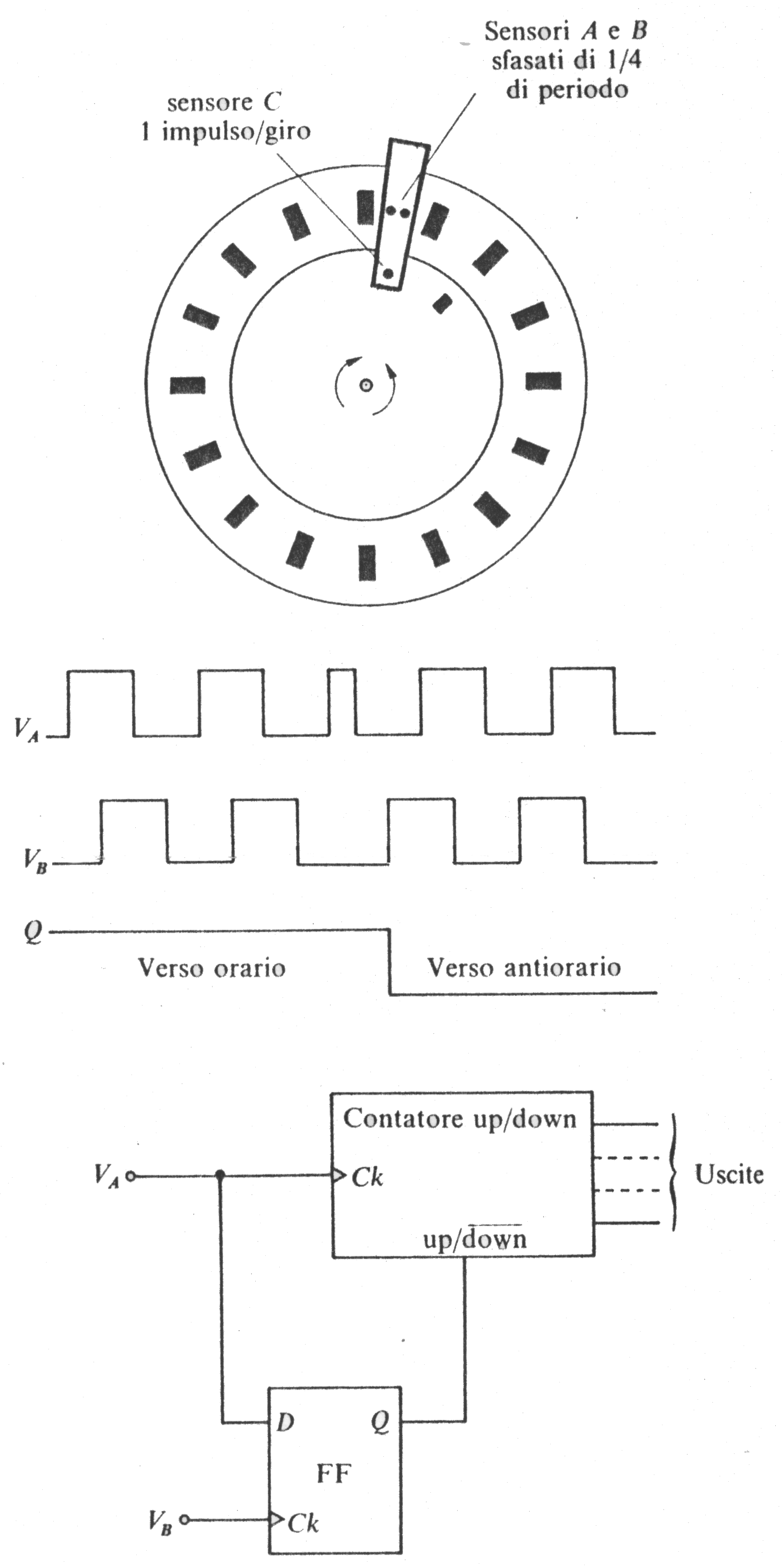
Esso comprende infatti almeno due elementi generatori di segnale (sensore A e B), disposti in modo che i due segnali prodotti risultino sfasati di circa ¼ di periodo; si desume il verso di rotazione osservando quale dei due segnali risulta in anticipo. Il conteggio degli impulsi può essere effettuato ad esempio mediante il semplice circuito di fig. 11. Il contatore riceve in ingresso il segnale Va ed esegue il conteggio avanti o indietro a seconda dello stato di uscita, rispettivamente 1 o 0, del flip flop FF. Quest’ultimo commuta sul fronte di salita del clock costituito dal segnale Vb; la sua uscita pertanto commuterà ( o rimarrà) ad 1 se, in corrispondenza di ciascun fronte di salita di Vb, Va è alto; questa situazione corrisponde evidentemente al verso di rotazione orario. Viceversa, se in corrispondenza al fronte attivo di Vb il segnale Va è basso, il flip flop si porterà a 0, segnalando il verso di rotazione antiorario. In commercio sono disponibili contatori programmabili integrati (sn 74 ls 2000b della Texas , s360 b114 della Siemens ecc.) che consentono la lettura diretta dei segnli di uscita di encoder incrementali e l’interfacciamento con microprocessori.
Alcuni encoder incrementali presentano anche una terza uscita (sensore C in figura) che fornisce un impulso per ogni giro completo. Un inconveniente intrinseco all’uso di tutti questi encoder è rappresentato dal fatto che la logica di conteggio è talvolta sensibile ai disturbi, che possono causare errori irrimediabili. Inoltre la caduta anche momentanea dell’alimentazione fa perdere ogni informazione sulla posizione raggiunta, senza possibilità di recupero.
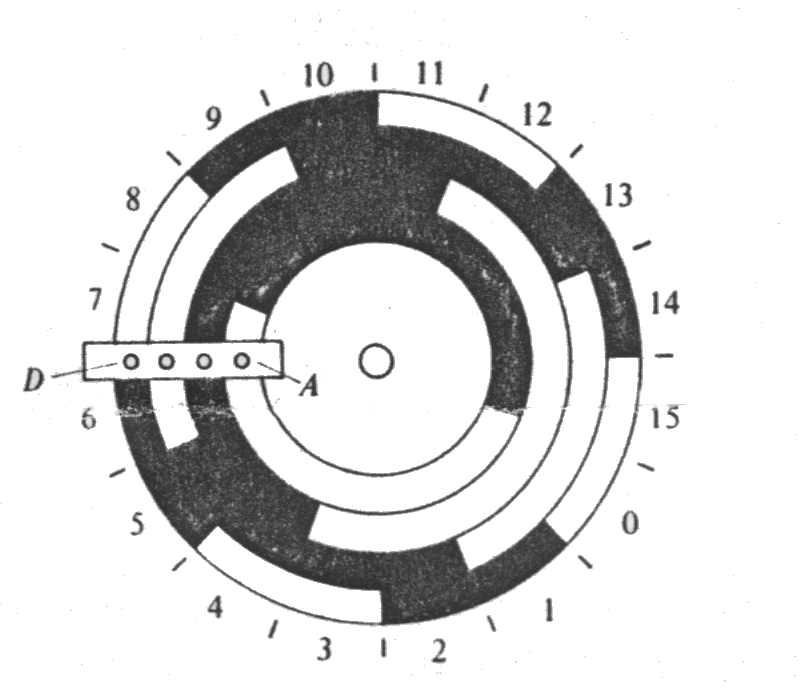
Gli encoder assoluti presentano più tracce opache, più elementi generatori di segnale e più uscite;
queste vengono lette in parallelo e forniscono un numero binario( sovente espresso in codice Gray onde evitare errori dovuti a leggere imperfezioni costruttive ), che fornisce direttamente la posizione dell’oggetto rotante. In figura è illustrato schematicamente il disco di un rudimentale encoder assoluto ed è indicata la rappresentazione dei dati di uscita per una rotazione completa.
| A | B | C | D | |
| 0 | 0 | 0 | 0 | 0 |
| 1 | 0 | 0 | 0 | 1 |
| 2 | 0 | 0 | 1 | 1 |
| 3 | 0 | 0 | 1 | 0 |
| 4 | 0 | 1 | 1 | 0 |
| 5 | 0 | 1 | 1 | 1 |
| 6 | 0 | 1 | 0 | 1 |
| 7 | 0 | 1 | 0 | 0 |
| 8 | 1 | 1 | 0 | 0 |
| 9 | 1 | 1 | 0 | 1 |
| 10 | 1 | 1 | 1 | 1 |
| 11 | 1 | 1 | 1 | 0 |
| 12 | 1 | 0 | 1 | 0 |
| 13 | 1 | 0 | 1 | 1 |
| 14 | 1 | 0 | 0 | 1 |
| 15 | 1 | 0 | 0 | 0 |
Dati di uscita in codice Gray
![]() Telecomunicazioni, Elettronica e
applicazioni
Telecomunicazioni, Elettronica e
applicazioni
I segnali acquisiti dal campo, spesso vengono trasferiti in luoghi remoti per essere successivamente elaborati.
Trasmissione dati
Nella sua accezione più generale la trasmissione dati si riferisce allo scambio diretto di informazioni in forma numerica fra sistemi di elaborazione, fra questi e i dispositivi terminali e anche fra elaboratori e sensori o attuatori di tipo analogico. Ovviamente in quest’ultimo caso i segnali analogici provenienti dai sensori devono subire una conversione A/D cosi come per i segnali diretti agli attuatori risulta necessaria una conversione D/A.
Esempi di sistemi di trasmissione dati possono essere:
| il collegamento fra due personal computer o fra più elaboratori o fra un elaboratore centrale e un terminale remoto; | |
| la connessione fra un elaboratore ed una stampante; | |
| il collegamento di un insieme di strumenti di misura ad un’unita di elaborazione centrale in un sistema di misura automatico; | |
| la trasmissione di informazioni attraverso il servizio Videotel; | |
| il rilevamento di dati atmosferici da una stazione remota. |
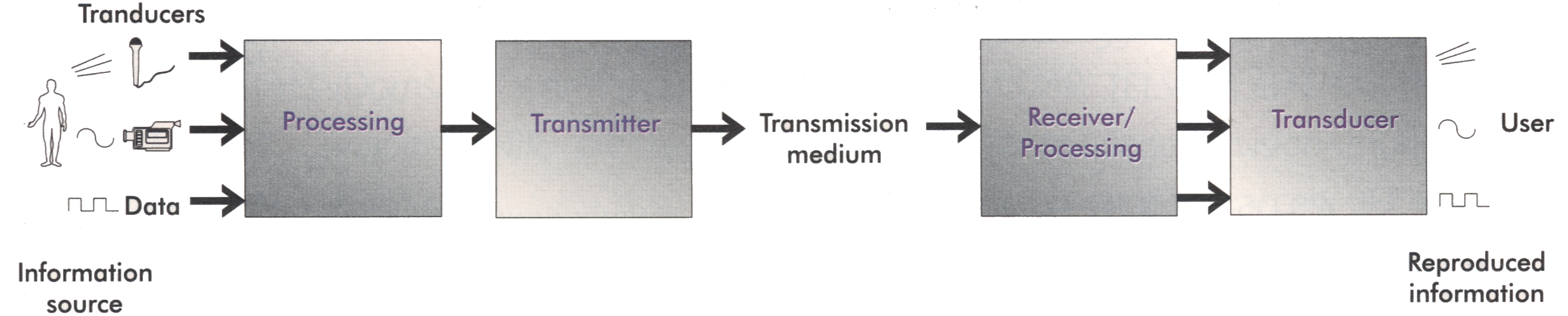
In figura è illustrata schematicamente la struttura di un sistema di trasmissione dati.

L’informazione da trasferire viene applicata al sistema di comunicazione attraverso il terminale di ingresso; i! circuito di interfaccia seguente ha il compito di convertire l’informazione di ingresso in una forma adeguata al canale di trasmissione. Una seconda interfaccia è di solito richiesta per convertire il segnale ricevuto in un’informazione compatibile con le caratteristiche del terminale di uscita. La scelta del tipo di trasmissione e la definizione degli elementi del sistema stesso è condizionata da vari fattori, fra i quali la distanza, la velocità di trasmissione richiesta, il rumore, i supporti a disposizione.
In un sistema di trasmissione dati i segnali digitali sono molto spesso codificati secondo il codice ASCII (American Standard Code for Information Interchange), che usa 7 bit per rappresentare 128 caratteri comprendenti i caratteri numerici e alfabetici, i caratteri speciali (ad esempio la punteggiatura) e caratteri di controllo utilizzabili per vari tipi di segnalazioni . Un ottavo bit, detto bit di parità, può essere impiegato per effettuare un parziale controllo della correttezza della trasmissione: il bit di parità viene posto ad 1 o a 0 per rendere pari (o dispari) il numero dei bit ad 1 del carattere e viene trasmesso con il carattere stesso. In ricezione viene controllato il numero totale dei bit ad 1 e se questo risulta dispari (o pari) viene segnalato un errore di trasmissione.
Altri codici talvolta utilizzati sono il Baudot a 5 bit, il codice BCD, esteso di solito a 6 bit per rappresentare 64 caratteri d codice EBCDIC a 8 bit (IBM) e il codice Moore. Occorre precisare che di solito indipendentemente dal codice usato e a meno di ragioni particolari, i dati da trasmettere sono o vengono convertiti, in formato seriale. In questo modo il numero dei conduttori richiesto per la trasmissione dei dati digitali da un terminale A ad un terminale B si riduce ad uno (più uno di riferimento di massa), ovvero è sufficiente un’unica linea trasmissiva . Oltre alla trasmissione unidirezionale denominata comunemente simplex ed esemplificata,si possono avere forme di comunicazione bidirezionali. In particolare si realizzano la trasmissione half-duplex, in cui la comunicazione puo avvenire in un senso e nell'altro ma non contemporaneamente e la trasmissione full-duplex, caratterizzata dal fatto che le comunicazioni nei due sensi possono essere simultanee. Mentre la comunicazione half-duplex richiede solo una coppia di fili di connessione, la tecnica full-duplex necessita di due coppie di fili. La comunicazione full-duplex a due fili è implementabile se si adotta qualche accorgimento per distinguere e separare i segnali in trasferimento nei due sensi: ad esempio si possono allocare i segnali in andata in un certo campo di frequenze e quelli in ritorno in un campo di frequenze diverso. La rappresentazione schematica pone a confronto le diverse modalità di trasmissione fra elementi trasmettitori (TX) e ricevitori (RX): simplex (ad una via), half-duplex (ad una via a senso alternato), full-duplex (ad una sola via e a due vie). Poichè durante la trasmissione i segnali subiscono inevitabilmente distorsioni di ampiezza e di fase e sono inquinati da rumore di varia natura, vengono spesso applicati metodi anche sofisticati per la rivelazione e 1'eventuale correzione degli errori. Si e già citato il controllo di parità, una forma di protezione molto usata in apparecchiature non troppo sofisticate e su collegamenti a breve distanza, che però consente di rivelare solo la presenza di un errore per carattere (o un numero dispari di errori per carattere). Sono stati studiati codici e vengono implementate tecniche che consentono di rivelare una percentuale più alta di errori e talvolta ne permettono anche la correzione. In generale pero ciò determina una più o meno elevata ridondanza in quanto ai bit del carattere o del messaggio vero e proprio occorre aggiungere altri bit, che costituiscono il blocco di controllo. La necessità, fondamentale di riconoscere, in ricezione, la sequenza dei bit che compongono ciascun carattere trasmesso e di individuare esattamente il livello logico di ciascun bit impone che il trasmettitore comunichi al terminale ricevente qual è il primo bit di ogni carattere e con quale cadenza si presenteranno i bit successivi. Ciò può essere attuato in due modi a seconda che la trasmissione sia di tipo asincrono o sincrono. Nel sistema, asincrono i caratteri vengono trasmessi con cadenza non necessariamente regolare; durante i tempi di inattività la linea è mantenuta in stato di riposo; il trasmettitore, prima di inviare il primo bit di ciascun carattere, deve portare la linea in stato di lavoro: questa commutazione costituisce il bit di Start.
Struttura dei caratteri espressi in codice ASCII in sistemi di trasmissione (a) asincrona e (b) sincrona.
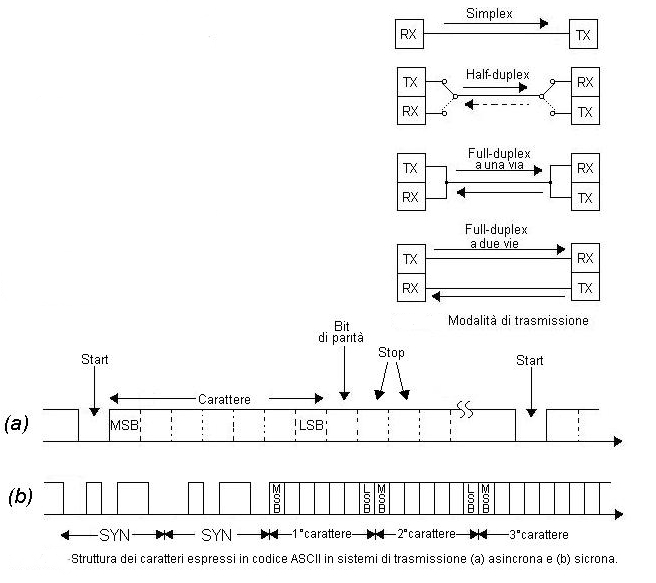
all’arrivo del bit di start, si predispone alla ricezione del carattere attivando un suo clock interno, che deve avere una frequenza uguale a quella del segnale trasmesso; si noti che è sufficiente che il clock del ricevitore mantenga il sincronismo solo per la durata del carattere. Trasmesso l’ultimo bit, il trasmettitore riporta la linea in stato di riposo e così la mantiene per un tempo pari alla durata di uno o due bit (bit di Stop), a seconda della convenzione adottata. Dopo la segnalazione di stop, se non vi sono altri caratteri da trasmettere, la linea rimane in stato di riposo, altrimenti viene emesso un nuovo bit di start e cosi di seguito. La trasmissione asincrona è conveniente quando l’emissione dei caratteri e irregolare come ad esempio nel caso dei terminali a tastiera; lo svantaggio principale sta nello scarso rendimento della trasmissione a causa della ridondanza dovuta all’aggiunta d"i bit di start e stop. Nella trasmissione sincrona i caratteri costituenti un messaggio vengono trasmessi, dopo essere stati raggruppati in blocchi, con cadenza continua in sincronismo con un clock condiviso dal trasmettitore e dal ricevitore. Ciascun blocco di caratteri inizia con una serie di caratteri di sincronizzazione (SYN) per permettere al ricevitore di sincronizzarsi o mettersi al passo con il trasmettitore. Con il sistema sincrono si ha una minore ridondanza, e quindi una migliore efficienza di trasmissione, a spese di una maggiore complessità circuitale, che pero trova piena giustificazione per le alte velocità di trasmissione consentite. Si è detto, in precedenza che un elemento molto importante nella scelta e nella valutazione dei sistemi trasmissivi è la velocità di trasmissione. Essa esprime il numero di elementi di segnale che possono essere trasferiti lungo il canale trasmissivo nell’unita di tempo; l’unita di misura generalmente adottata è il baud (Bd).Nel sistema binario gli elementi di segnale sono i bit, che possono assumere solo due valori, 0 e 1; la velocità di trasmissione può essere espressa allora in bit/s e il suo valore coincide con la velocità espressa in baud. Questa corrispondenza non e più valida nei casi in cui’ l'elemento di segnale può assumere più valori per cui il suo contenuto informativo corrisponde a quello di più bit. La velocità massima di trasmissione lungo un canale, detta anche capacità del canale (C), dipende oltre che dal sistema di codifica utilizzato anche dalle caratteristiche del canale stesso e in particolare dalla sua larghezza di banda B. Trascurando gli effetti del rumore, la capacita in bit/s di un canale e determinata dalla relazione
C =2Blog2n
dove n è il numero di livelli che può assumere 1'elemento di segnale. Nel caso del sistema binario, n = 2 e quindi C = 2B. In pratica, rumore e distorsioni di fase e frequenza limitano la velocità massima a valori inferiori a quelli teorici e impongono 1'impiego di elementi ripetitori che rigenerino il segnale lungo la linea di trasmissione.
![]() Inglese
Inglese
Traduzione
![]() Matematica
Matematica
La funzione logaritmica
Assegnato un numero a, reale positivo e diverso da 1, si dice logaritmo in base a di un numero b reale positivo, l’esponente c a cui si deve elevare la base a per ottenere il numero b e si scrive:
log ab = c se e solo se ac= b
La funzione logaritmica, funzione inversa della funzione esponenziale, indicando, come è consuetudine, con x la variabile indipendente e con y la variabile dipendente.
Le proprietà dei logaritmi si ricavano dalle proprietà delle potenze.
Dalle relazioni a0 = 1 e a1 = a,
Si ha: log a1=0 log aa=1
| cioè, in qualsiasi base il logaritmo di 1 è uguale a 0 ed il logaritmo della base è uguale a 1 |
| Non esistono il logaritmo di zero e i logaritmi dei numeri negativi |
| Il logaritmo del prodotto di due numeri reali positivi è uguale alla somma dei logaritmi dei due numeri, cioè: |
log a(b*c) = log ab+log ac
| Il logaritmo del rapporto di due numeri reali positivi è uguale alla differenza fra il logaritmo del numeratore ed il logaritmo del denominatore, cioè: |
log a b/c = log a b - log ac
| Il logaritmo di una potenza con base positiva è uguale al prodotto dell’esponente per il logaritmo della base della potenza, cioè: |
log a bc = c* log ab
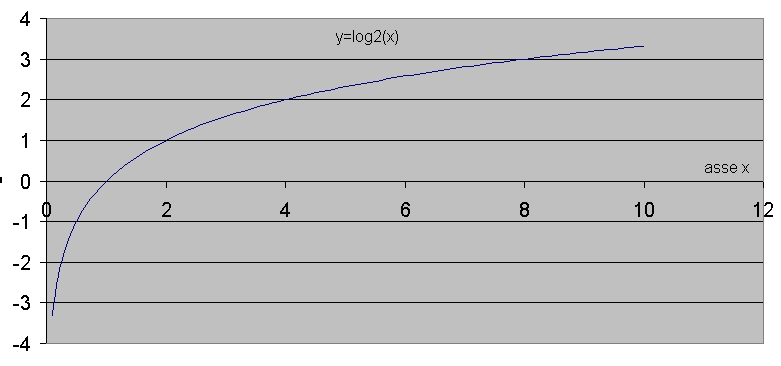
grafico della funzione y=log2(x) realizzato con
![]()

![]()