![]()
 Docente: Prof. Mauro De Berardis
Docente: Prof. Mauro De Berardis
Lavori eseguiti dagli alunni della classe Quinta B TIEN IPSIA Teramo
Coordinamento: Prof. Mauro De Berardis, Prof. Loreto Giovannucci
Rete Ethernet 
![]()
![]()
Lavoro eseguito dall'alunno Fausto Pappalardo

![]()
![]()
Come funziona una rete Ethernet
Ethernet è il tipo più diffuso di rete locale che esista al mondo. Con rete locale s’intende un sistema di collegamento tra diversi computer, tutti collegati all’interno del medesimo edificio, entro edifici contigui oppure nell’arco di pochi chilometri nel caso in cui non esistano confini di riferimento precisi. Tale sistema consente lo scambio diretto di informazioni in formato elettronico tra più di due computer senza ricorrere al passaggio di dischetti. La natura generale di qualsiasi LAN (Local Area Network – rete locale) e quella di Ethernet specialmente è di consentire il libero colloquio con qualsiasi macchina collegata e di trasmettere la stessa informazione contemporaneamente a tutte le altre macchine in ascolto (Broadcastng). Ethernet non è necessariamente la migliore delle tecnologie possibili, ma si è dimostrata la più economica e la più facile da utilizzare il che ha decretato un enorme successo a tutti i livelli d’impiego e in qualsiasi area geografica del mondo. La sua storia ha inizio nei primi anni Settanta presso il Palo Alto Research Center (PARC), il laboratorio di ricerca Xerox, per opera di Robert Metcalfe e David Bloggs. Il lavoro iniziò intorno al 1972 ma la sua prima definizione pubblica risale ad un articolo pubblicato nel 1976 con la firma dei due inventori. Dobbiamo aspettare il Dicembre del 1980 per averne la prima versione utilizzabile, dovuta all’iniziativa di Xerox. Digital Eqpment e Intel. Nel 1982 lo standard iniziale fu sostituita dalla versione 2.0. Detta anche Ethernet II oppure DIX (Digital Intel Xerox) che costituisce ancora oggi uno standard di riferimento per numerosi impianti.
Il sistema di trasmissione
Ethernet usa un solo cavo per collegare decine di stazioni di lavoro, ciascuna delle quali riceve contemporaneamente tutto quello che passa sulla rete, mentre solo una stazione alla volta ha la facoltà di trasmettere. Ogni stazione è indipendente e non una sola stazione che funzioni da arbitro, le informazioni sono trasmesse nella formula d’impulsi che si propagano a partire dalla stazione emittente verso i due estremi della rete ( a destra e a sinistra ) fino a raggiungere il punto in cui il cavo termina a due estremi. In questo percorso incontrano altri nodi che sono collegati lungo il cavo e che ascoltano tutto quello che passa cercando di scoprire se è indirizzato a loro. Ogni messaggio in transito sulla rete (detto anche trama o frame, all’inglese perchè composto da una sequenza di bit tra loro combinati) reca al proprio interno l’indirizzo di origine e quello di destinazione, perciò ogni macchina lo copia in una piccola porzione di memoria (buffer) di cui dispone nella scheda d’interfaccia, legge l’indirizzo di destinazione e, se non coincide con il proprio, lo scarta. Con questo meccanismo, assicurandosi che una sola macchina alla volta abbia la possibilità di trasmettere mentre tutte le altre sono in ascolto, si costruisce in modo semplice una rete in cui è facile aggiungere nodi, visto che ogni nuovo nodo riceve automaticamente tutto quello che transita sul cavo e diventa immediatamente parte del gruppo di lavoro, acquistando anche la facoltà di trasmettere ogni volta che la linea è libera. Questo sistema vale per qualsiasi genere di rete Ethernet, indipendendemente dalla sua velocità di funzionamento o dal tipo di cavo utilizzato. Ogni scheda di rete disponibile in commercio dispone di un proprio indirizzo permanente, unico al mondo, espresso in numeri esadecimali e lungo 12 Byte. I primi 6 Byte di questo indirizzo indicano il costruttore, e vengono conservate in un registro mondiale così da evitare duplicazioni. Gli altri 6 Byte vengono assegnati al costruttore medesimo, scheda per scheda, così da creare una combinazione univoca per ciascun pezzo. Grazie a questo metodo è possibile risalire in ogni momento a chi ha fabbricato la scheda e non esiste la benchèminima possibilità che sulla stessa rete esistano due nodi con il medesimo indirizzo fisico. La connessione di varie macchine sullo stesso cavo prende il nome di tipologia elettrica a "bus". Con tipologia elettrica si indica la disposizione delle connessioni elettriche che uniscono i diversi nodi di una LAN o, più in generale, il percorso logico che le informazioni seguono per arrivare a destinazione. Il fatto che tutti ricevano contemporaneamente lo stesso segnale e sono collegati al medesimo percorso trasmissivo. Nelle prime reti Ethernet la topologia elettrica corrispondeva anche alla topologia fisica, cioè al modo in cui fisicamente le varie stazioni venivano collegate tra loro. Successivamente, con l’adozione del doppino, si è mantenuto una topologia elettrica a bus ( elemento invariabile nella natura di Ethernet ), ma la topologia fisica, cioè il modo in cui i cavi vengono distribuiti, è diventata una stella: tutte le macchine si collegano al punto centrale, come vedremo più avanti. Qualunque sia la topologia fisica e qualunque sia la velocità, la tecnica trasmissiva su rame rimane invariata e consiste nel trasmettere un segnale che assomigla ad un’onda quadra e che oscilli tra valori di tensioni negativi e positivi e ogni transizione ( da negativo a positivo o viceversa ) indica la presenza di una cifra binaria, rispettivamente 1 e 0. Questo sistema prende il nome di codifica di Manchester e ha il vantaggio di rendere molto più sicuro il riconoscimento degli 1 e degli 0 visto che non si misura l’ampiezza dell’impulso ( alto per 1 e basso per 0 come avviene all’interno del PC ) ma si usa l’inversione di polarità, facilmente riconoscibile anche in caso di presenze di disturbi.
Come viene regolato l’accesso alla rete: il CSMA/CD
Nella rete Ethernet non esiste un arbitro degli accessi bensì un meccanismo in base al quale le singole stazioni di lavoro si "autodisciplinano", astenendosi dal trasmettere quando qualcun’altra lo sta già facendo. Tecnicamente questo sistema prende il nome di CSMA/CD ( Carrier Sense Multiple access/Collision Detection - accesso multiplo a rilevazione di portante con segnalazione di collisione ). Interpretando il significato di questa sigla si comprende anche l’autonomia del meccanismo. La prima azione che qualsiasi scheda d’interfaccia esegue prima di iniziare a trasmettere consiste nell’ascoltare se qualcuno lo sta già facendo, ecco la rivoluzione della portante. Nel caso qualcuno stia trasmettendo, sul cavo sarà presente un segnale a 20 MHZ su cui viaggiano 10 Mbit per secondo (codificati con il sistema di Manchester ). In caso di "occupato" la workstation desiste e tenta di trasmettere più tardi. L’accesso alla rete è multiplo, perciò tutte le stazioni hanno la stessa facoltà di parlare a condizione di accertarsi prima che la linea sia libera, operazione che possono seguire tutte in contemporanea. Supponiamo, a questo punto, che due stazioni siano pronte a trasmettere e che abbiano trovato la linea libera. La trasmissione parte nello stesso momento e quella della prima inevitabilmente collide con quella della seconda provocando l’ingarbugliamento del segnale elettrico e l’impossibilità di riconoscere i bit che vi erano contenuti. Se non esistesse nessun sistema che segnalasse l’avvenuta collisione, le due stazioni continuerebbero a trasmettere i rispettivi messaggi per intero, nella convinzione che questi arriveranno a buon fine. Per questo motivo i progettisti hanno inserito nella scheda d’interfaccia un ulteriore circuito che rimane sempre in ascolto, anche quando la scheda medesima sta trasmettendo, per verificare che non siano avvenute collisioni. Il circuito in se non è complesso, infatti tutto ciò che deve verificare è l’esistenza di valori di tensioni superiori alla norma. In caso di collisione, infatti, i segnali elettrici delle due stazioni si mescolano e finiscono anche per sommarsi, perciò la tensione risultante che circola in rete è maggiore. Non appena la collisione viene rilevata, le schede d’interfaccia di entrambe le stazioni non interrompono immediatamente la trasmissione, ma continuano a inviare bit fino a raggiungere la dimensione minima di un pacchetto di 64 Byte. Questo per fare in modo che tutte le altre macchine sulla rete si accorgano che la collisione è in corso e che la rete è momentaneamente bloccata. Dopo di che interrompono la trasmissione e attivano un timer di durata casuale prima di rientrare la trasmissione. Il fatto che il timer sia causale impediscono che entrambe ripartano nello stesso istante, causando una nuova collisione. Se nonostante l’uso dei timer, la collisione si verificasse ancora, il timer verrebbe allungato progressivamente fino a un punto in cui il continuare delle collisioni indicherebbe un guasto fisico sulla rete e le singole schede d’interfaccia comunicherebbero al rispettivo computer l’impossibilità di trasmettere. Nella realtà le collisioni sono più frequenti di quello che a prima vista potrebbe sembrare. Infatti oltre al caso fortuito visto prima di due stazioni che trasmettono esattamente nello stesso momento, esistono anche altri casi in cui due o più macchine cercano di prendere possesso della linea con la convinzione che sia libera, quando questa in realtà non lo è e c’è già qualcun altro che ha cominciato a trasmettere.
10Base-2 ( 10 Mbps Baseband 200 metri – 10 Mbps banda base a 200 metri su coassiale sottile)
Uno degli standard per le reti Ethernet particolarmente diffuso alla fine degli anni Ottanta. Definisce le modalità per trasmettere dati a 10 Mbit per secondo con modalità baseband (a impulsi) su un cavo coassiale a sezione sottile (3/16 di pollice equivalenti a circa 5 millimetri di diametro, chiamato in codice RG 58) su una distanza massima di 200 metri (185 volendo rispettare rigorosamente le specifiche dello standard). Il cavo passa da una macchina all’altra come un lungo serpentone flessibile e si connette in ogni fermata a uno speciale connettore a baionetta (BNC in sigla) sagomato a T.
 connettore
BNC a T e terminatore
connettore
BNC a T e terminatore
La base della T s’inserisce nella scheda del computer, mentre alle altre due estremità troviamo lo spezzone di coassiale entrante e lo spezzone di coassiale uscente.
 scheda
di rete Ethernet
scheda
di rete Ethernet
Ai due estremi del segmento vanno posti due tappi terminatori che impediscono al segnale elettrico di essere riflesso e di tornare indietro mescolandosi con quello in transito. Se s’interrompe il cavo in qualsiasi punto, l’intero segmento cade. Si tratta di un sistema di cablaggio economico e abbastanza flessibile: per aggiungere una macchina alla rete basta aggiungere un pezzo di coassiale e non bisogna comperare concentratori (hub) come nel caso del 10Base – T. può integrarsi con una rete 10Base – T o 100Base – T con l’aggiunta di un dispositivo ponte (bridge).
10Base – T (10 Mbps Baseband Twisted pair – 10 Mbps banda base su doppino ritorto).
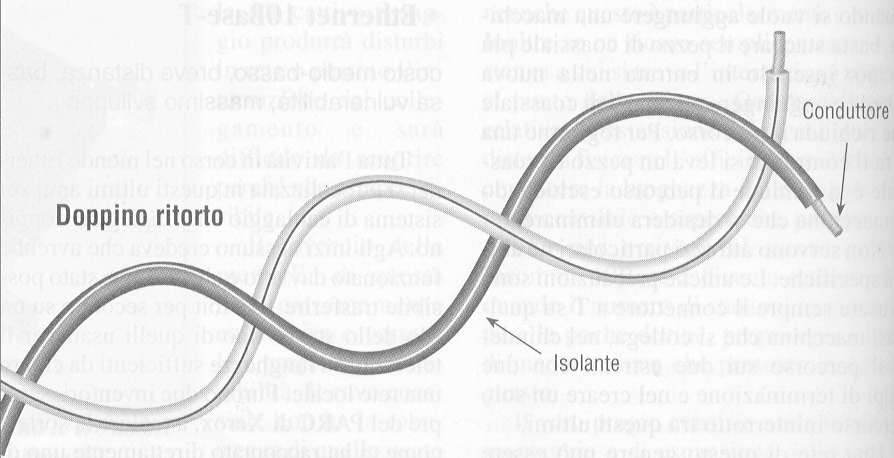
Una versione di rete locale Ethernet funzionante su doppino di tipo telefonico approvata come standard nel 1990. Il nome significa che funziona a 10 Mbit per secondo con una trasmissione di tipo baseband (trasmissione a doppio impulso) su doppino ritorto (twisted pair) non schermato. La tipologia fisica ha la forma di una stella: tutti i computer si collegano a un concentratore (hub) con tratte di filo individuali, perciò se una tratta s’interrompe l’unica a soffrirne è la macchina interessata, anziché tutto il segmento come accade con l’Ethernet su cavo coassiale. La tipologia elettrica è tuttavia quella tipica delle reti Ethernet: un bus (percorso continuo e comune) che corre da una macchina alla successiva con una terminazione elettrica a entrambi gli estremi. E’ il concentratore che collega i singoli spezzoni di filo in entrata e in uscita in modo che siano uno la continuazione elettrica dell’altro. La lunghezza massima della tratta di doppino che unisce la singola stazione all’hub è di 100 metri. E’ possibile collegare in cascata fino a 4 hub per un totale di 500 metri di diametro massimo ( la distanza tra le due stazioni agli estremi).
 cavo UTP per LAN
cavo UTP per LAN
Fast Ethernet (Ethernet veloce)
Un tipo particolare di rete Ethernet che funziona a 100 Mbit per secondo invece che a 10 Mps. Come cavo trasmissivo si usa un doppino ritorto non schermato (simile al cavo telefonico ma di qualità superiore) per tratte massime di 100 metri. Usa un concentratore (hub) diverso dall’Ethernet a 10 Mbps e funziona su reti più corte in ragione dell’alta velocità: 205 metri complessivi invece di 500 metri complessivi che si raggiungono a 10 Mbps (la distanza aumenta a seconda della qualità dei ripetitori – hub impiegati – e dalla combinazione di doppino e fibra ottica e si arriva anche a più di 300 metri). Per il resto finziona esattamente come un Ethernet convenzionale e per questo motivo quasi tutte le schede Fast Ethernet in circolazione possono anche funzionare a 10 Mbps.
Hub.

La parola hub in inglese significa "perno" con riferimento al centro della ruota dove confluiscono tutti i raggi di sostegno e intorno al quale l’intera ruota gira. E’ un’apparecchiatura che si è diffusa nel mondo delle reti locali nella seconda metà degli anni Ottanta e che consenta di realizzare un sistema di cablaggio a stella, dove tutte le connessioni provenienti dalle workstation di un certo gruppo di lavoro confluiscono verso un centro di connessione che può essere attivo o passivo, ma il cui scopo fondamentalmente rimane quello di creare una connessione elettrica tra tutte le macchine che vi sono collegate ed eventualmente altri hub. L’hub viene usato solitamente con doppino (schermato e non) e trova impiego nelle reti Token Ring dove prende più propriamente il nome di MAU (Multistation Acces Unit). Il vantaggio dell’impiego di un hub e di un cablaggio a stella è che si possono aggiungere e togliere workstation in qualsiasi momento senza interrompere la continuità di collegamento delle altre e che eventuali stazioni con schede d’interfaccia guaste possono essere isolate automaticamente senza compromettere la connessione di tutte le altre. Inoltre, nel caso di alcuni hub, la gestione può essere eseguita a distanza per mezzo di speciali software di controllo e monitoraggio.
IEEE (Institute of Electrical and Electronics Engineers – Istituto degli ingegneri elettrotecnici ed elettronici)
Chiamato anche "I triple E". ente statunitense con sede a New York che riunisce scienziati, ingegneri e studenti. Nato nel 1963 dalla fusione dell’IRE (Institute of Radio Engineers), l’IEEE concentra la propria attività nella definizione standard per il mondo dell’elettronica, in generale, e per i sistemi da calcolo, in particolare. I suoi standard più conosciuti sono quelli che riguardano le modalità di realizzazione fisica dei vari tipi di rete locale oggi.
![]() Elettronica, Telecomunicazioni ed applicazioni
Elettronica, Telecomunicazioni ed applicazioni
Tipi di trasmissione
La trasmissione dati risulta condizionata (in termini di velocità e capacità trasmissive) anche dalla tecnica con cui possono essere convogliati i dati stessi in linea; esistono due tecniche di trasmissione attuate dai DTE:
| La tecnica parallela |
| La tecnica seriale |
La tecnica maggiormente usata è quella seriale, per due motivi:
| Per un motivo di costi minori( è sufficiente soltanto una linea di collegamento) | |
| Per il fatto che gli elaboratori, in genere, forniscono i dati in uscita proprio in modo "seriale" |
Per contro, è intuibile che questo tipo di trasmissione risulti più lenta di quella parallela, visto che i dati potranno essere trasmessi in linea, solo uno di seguito all’altro, e non tutti contemporaneamente come invece avviene nel sistema parallelo, infatti, volendo trasmettere ad esempio una "parola" di otto bit, con il sistema seriale occorreranno otto intervalli di tempo prima che tutta la parola venga ricevuta, mentre con il sistema parallelo occorrerà un solo intervallo di tempo.
Comunque la trasmissione parallela, presentando costi di cavo piuttosto elevate, trova poche applicazioni pratiche, salvo qualche collegamento locale di breve distanza (un esempio tipico è rappresentato dal collegamento tra DTE e stampante).
Nell’ambito della trasmissione seriale. I dati, costituiti da un’insieme di bit, vengono immessi in linea uno dietro l’altro in modo continuo, ciò che comporta il rischio di perdere l’esatta definizione di ciascun carattere (per carattere si intende un insieme di bit, detto anche "stringa", il cui numero viene definito in modo univoco dal codice di trasmissione; ne vedremo il significato più avanti) che costituisce il dato od informazione.
Infatti se non viene specificata una procedura od una regola opportuna, il ricevente non potrà sapere qual è il primo bit del primo carattere trasmesso, e quindi gli errori di interpretazione possono essere piuttosto elevati.
Occorre quindi introdurre un metodo per poter riconoscere una combinazione binaria dall’altra (ogni combinazione binaria costituisce un carattere, un insieme di caratteri costituisce un dato, un’insieme di dati costituisce un’informazione).
Il problema viene risolto tramite un’opportuna "chiave" di riconoscimento o di lettura, la cui conformazione può variare a seconda se la "serializzazione" dei bit avviene:
| In modo asincrono |
| In modo sincrono. |
Questi due modi di trasmettere i dati seriali, non rientrano nella costituzione della linea, ma bensì influiscono sulla procedura di comunicazione tra due o più DTE.
Trasmissione Asincrona
Viene detta anche trasmissione "Start-Stop", in quanto la "chiave" richiesta per la definizione dei singoli caratteri , viene attuata introducendo, per ogni carattere, dei bit di Start (per individuare l’inizio del carattere) e di Stop (per individuare la fine del carattere).
Questo tipo di trasmissione è caratterizzato anche dal fatto che non è necessaria una precisa relazione temporale tra un carattere e l’altro, in quanto ognuno di essi, grazie ai bit di start e di stop, risulta in questo modo perfettamente definito, e quindi riconoscibile dal ricevente,; questo fatto determina una trasmissione piuttosto lenta, dato che il tempo di intercorrenza tra un carattere e l’altro (detto anche tempo di intercarattere), non essendo fissata alcuna temporizzazione, dipende dalla velocità di battitura dell’operatore (molto più lenta della velocità di elaborazione di un qualunque DTE).
La struttura di un carattere asincrono deve comunque rispettare le seguenti regole:
| La polarità di riposo (ossia quella a minor voltaggio) viene associata al bit 1, e viene detta "Mark" (Segno) |
| La polarità di lavoro (ossia quella a più alto voltaggio) viene associata al bit 0, e viene detta "Space" (Spazio) |
| Il bit di Start deve essere di polarità diversa da quella di riposo (dovrà essere quindi di livello 0), e deve precedere il primo bit di carattere |
| Il bit (o più bit) di Stop deve essere di polarità uguale a quella di riposo (quindi di livello 1), e deve (o devono) seguire l’ultimo bi di carattere. |
| Il bit di Start è sempre uno solo |
| Il bit di Stop invece può avere una durata di 1/ 1,5 /2 bit |
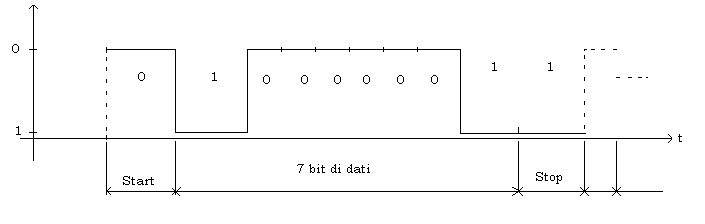
N.B. Come si può notare, in trasmissione dati, viene assunta la "logica negativa".
Inoltre il valore di tensione attribuito ai due livelli logici, dipende dal tipo di tecnologia usata per la costruzione delle varie circuiterie (TTL, CMOS, ecc..).
Durante la trattazione di questo tipo di trasmissione, si è detto che l’invio dei vari caratteri costituenti l’informazione, non avviene in maniera temporizzata.
Occorre chiarire che in realtà esiste invece una forma di temporizzazione che avviene nel DTE ricevente; infatti i dati, venendo trasmessi tramite il "mezzo fisico doppino telefonico", subiscono le note deformazioni in termini di ampiezza e di fase (tanto più rilevanti tanto più ampia è la banda di frequenza occupata daol segnale, e quanto più lunmga e disturbata è la linea telefonica; si ricorda che il segnale digitale è definito al "larga banda").
Per far fronte a questo problema ineliminabile al massimo è possibile ridurne gli effetti tramite opportune stazioni rigeneratrici o amplificatrici, a seconda che la trasmissione sia relativa ad un segnale digitale o analogico), si introduce nell’ambito del carattere, un’opportuno segnale di clock (orologio di temporizzazione) che scandisca la ricezione dei bit.
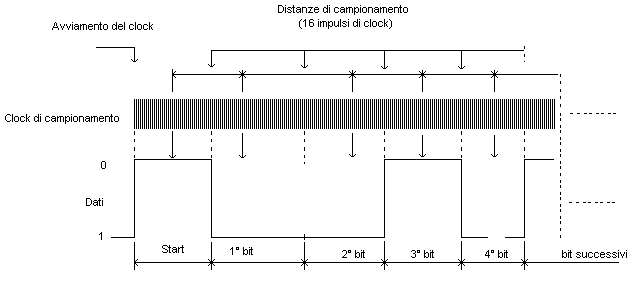
In questo modo il ricevente conoscerà la "cadenza" dei bit del carattere, e saprà quando e dove leggerli, riducendo al minimo gli errori di lettura derivanti dalkle deformazioni di linea; infatti il suddetto clock viene generato in modo da leggere il bit al "centro" dello stato logico dove sicuramente vi è una soglia di decisione valida.
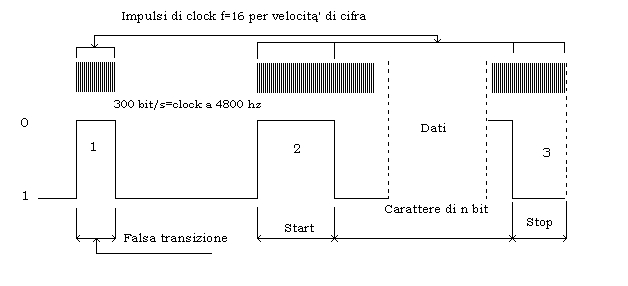
Questo clock viene "resettato" (azzerato) ogni volta che arriva un bit di Stop, mentre viene avviato ogni volta che arriva un bit di Start; in questo modo viene ancora rispettato il concetto di trasmissione asincrona (non temporizzata), ma ogni carattere inviato risulta regolamentato in termini di "durata".
Nella pratica più diffusa viene utilizzato un clock con frequenza 16 volte maggiore della frequenza del segnale digitale da trasmettere (cioè nell’intervallo di tempo di un bit, vengono imposti 16 periodi di clock); la lettura del bit in arrivo, rimane legata pertanto all’ottavo impulso di clock, che corrisponde proprio la centro del bit stesso, secondo il criterio sopracitato.
In questo modo il DTE ricevente risulta "sincronizzato" sul carattere, e ne può così verificare la correttezza di trasmissione, scartando anche gli eventuali "bit anomali" costituiti da impulsi spuri prodotti dalla rete trasmissiva e non dal DTE trasmittente.
![]() Matematica
Matematica
La velocità di trasmissione esprime il numero di informazioni trasmissibili nel tempo di un secondo.
V= B*log2(1+S/R)
dove B è la larghezza della banda di frequenza trasmissibili, che può indicare la larghezza del canale e la larghezza della banda passante, e S/R rappresenta il rapporto segnale-rumore.
La funzione logaritmica
Assegnato un numero a, reale positivo e diverso da 1, si dice logaritmo in base a di un numero b reale positivo, l’esponente c a cui si deve elevare la base a per ottenere il numero b e si scrive:
log ab = c se e solo se ac= b
La funzione logaritmica, funzione inversa della funzione esponenziale, indicando, come è consuetudine, con x la variabile indipendente e con y la variabile dipendente.
Le proprietà dei logaritmi si ricavano dalle proprietà delle potenze.
Dalle relazioni a0 = 1 e a1 = a,
Si ha: log a1=0 log aa=1
| cioè, in qualsiasi base il logaritmo di 1 è uguale a 0 ed il logaritmo della base è uguale a 1 |
| Non esistono il logaritmo di zero e i logaritmi dei numeri negativi |
| Il logaritmo del prodotto di due numeri reali positivi è uguale alla somma dei logaritmi dei due numeri, cioè: |
log a(b*c) = log ab+log ac
| Il logaritmo del rapporto di due numeri reali positivi è uguale alla differenza fra il logaritmo del numeratore ed il logaritmo del denominatore, cioè: |
log a b/c = log a b - log ac
| Il logaritmo di una potenza con base positiva è uguale al prodotto dell’esponente per il logaritmo della base della potenza, cioè: |
log a bc = c* log ab
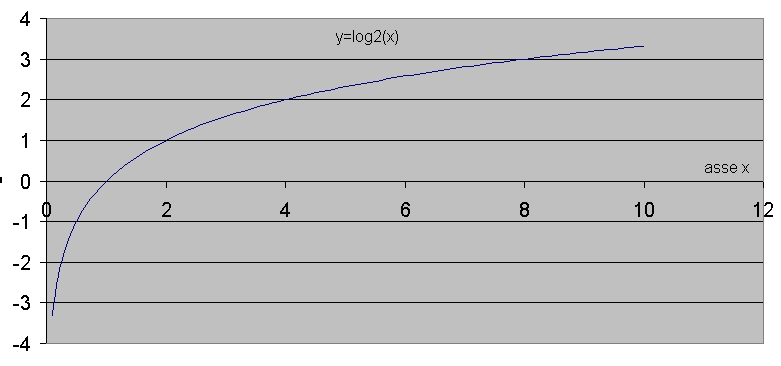
grafico della funzione y=log2(x)
realizzato con ![]()
![]() Inglese
Inglese
The Basic Optic Fiber
The basic optic fiber consists of an ultraclear silica or a halide or fluoride glass light-transporting core,
of silicon grease on it. The lower index results in the reflection back into the core area of almost all light rays or waves in the core that may strike the core-cladding boundary at a low angle. Around the glass cladding is an opaque protective plastic coating. The opacity prevents outside light from reaching the core, as well as inner "light" from leaving the fiber. The whole fiber, including cladding and protective coating, is flexible enough so that it can foJlow reasonably sharp bends (1 ft diameter) without excessive stressing or breaking of the fiber. A more fiexible fiber has been developed that substitutes a silicone plastic as the cladding, but because of its greater transmission losses it is only used for runs of a few hundred yards. Fiber cables may be made up of 12 fibers in a small ribbon, with perhaps 6 ribbons piled one over the other, all twisted slightly to reduce lateral stress. Around this is a heat-pro- tective cover, then two opposite-wound steel wires with plastic sheaths between, and a final plastic outer sheath. Such a cable can carry a staggering amount of information. Other cables may have from one to as many as 36 fibers.
Le Fibre Ottiche
La fibra ottica consiste di un tubo di vetro o di silice il cui centro viene attraversato da un fascio di luce il tubo è cosparso di grasso di silicone per evitare che si blocchi alle pareti del cavo.
Il nucleo è la parte interna della fibra ottica, ed è costituita da un materiale con un indice di rifrazione maggiore di quello del mantello. Intorno al tubo di vetro è presente un altro rivestimento chiamato mantello o cladding, è un rivestimento opaco protettivo plastico. L'opacità previene che luce fuoriesca dal tubo di vetro e possa abbandonare la fibra. Tutta la fibra, cladding incluso è molto flessibile, così che può seguire curve molto accentuate senza avere la rottura della fibra. Una fibra più flessibile è stata sviluppata per sostitutire il cladding al silicone plastico, questo perché la trasmissione aveva grandi perdite, quindi veniva solo usato per percorre circa alcuni chilometri. Il cavo di Fibra può essere fatta di 12 fibre all’interno di un nastro , con altri 6 nastri attorcigliati uno sopra l'altro, tutto questo per ridurre la tensione laterale. Intorno c’è una copertura di plastica isolante, poi ci sono altri due fili di acciaio attorcigliati in senso opposto, e alla fine c’è un rivestimento di plastica che avvolge il tutto. Un cavo simile può trasportare una quantità notevole di informazioni al suo interno. Gli altri cavi possono supportare fino a 36 fibre

![]()