![]()
 Docente: Prof. Mauro De Berardis
Docente: Prof. Mauro De Berardis
Lavori eseguiti dagli alunni della classe Quinta B TIEN IPSIA Teramo
Coordinamento: Prof. Mauro De Berardis, Prof. Loreto Giovannucci
Proximity e fine corsa 
![]()
![]()
Lavoro eseguito dall'alunno Errico Biscotti

![]()
![]()
Generalità sui trasduttori
I trasduttori sono dispositivi che trasformano una grandezza fisica in una grandezza di un altro tipo, generalmente elettrica per poterla misurare o per poterla confrontare con una grandezza della stessa natura. In genere un sistema di misura è costituito da un primo trasduttore d’ingresso che trasforma la grandezza che si vuole misurare in una grandezza d’altro tipo generalmente elettrica. Successivamente è presente un secondo blocco modificatore che amplifica o varia una qualche caratteristica del segnale d’uscita del primo trasduttore affinchè esso costituisca l’ingresso di un secondo trasduttore che lo converta in modo da avere un segnale facilmente leggibile.
Le principali caratteristiche di un trasduttore si possono classificare nel seguente modo:
| Campo di funzionamento: è l’intervallo di valori che il trasduttore può accettare conservandone le caratteristiche di precisione senza che esso sia danneggiato. | |
| Risoluzione o potere risolutivo: in un trasduttore l’uscita non varia mai con continuità ma presenta sempre una discontinuità, tra un valore e il successivo. Quindi si ha un andamento a gradino perciò si verifica che a due valori d’ingresso diversi, corrisponde una stessa uscita. | |
| Precisione dello strumento: è il massimo errore assoluto che si ha nel campo di misura e il massimo valore misurabile. | |
| Linearità: un trasduttore si definisce lineare quando la curva rappresentante il legame tra ingresso ed uscita è una retta. | |
| Sensibilità: viene definita come sensibilità il rapporto tra la variazione della grandezza in uscita e la variazione della grandezza in ingresso: S=D u/D i. | |
| Tempo di risposta: si definisce come tempo di risposta il tempo necessario affinchè l’uscita raggiunga, senza oscillazioni, un valore pari al 90% del valore a regime. | |
| Vita di un trasduttore: è il tempo oltre il quale non è più garantito il corretto funzionamento del trasduttore. |
Le possibilità di impiego degli interruttori di prossimità sono tantissime: ad esempio il controllo di posizioni predeterminate o la segnalazione di emergenze, nel caso vengano superate posizioni limite, e così via.
Proximity e fine-corsa
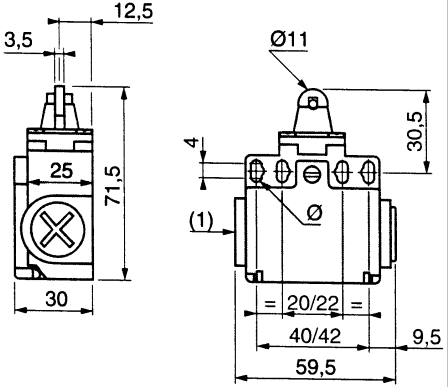
I finecorsa possono essere composti da microinterruttori, in miniatura per impieghi di precisione, oppure da interruttori a levetta o a pulsante o ancora da interruttori di prossimità. Nelle figure seguenti proponiamo le tre versioni, tratte da alcuni cataloghi di fine corsa presenti sul mercato italiano.

Il meccanismo interno può essere a molla avvolta a spirale o composto da materiale elastico, per quanto riguarda gli interruttori. Mentre per i proximity, si parla di sensori ad induzione o capacitivi.
Parliamo delle caratteristiche principali, iniziando dagli interruttori.
La durata, elettrica e meccanica, ne stabilisce la qualità; si parla di circa100.000 operazioni per la prima e 10.000.000 per la seconda. A queste si aggiunge la velocità operativa ( da 100 a 500 op/min).
La tensione massima applicabile sui contatti ( circa 1000 Vca/minuto), la resistenza del contatto (10 – 50 mW ) e quella di isolamento (circa 10MW ), la corrente che attraversa il contatto (può essere ad esempio da 1 a 5 AMPERE per tensioni massime di 250Vca, oppure da 0,1 a 0,5A per tensione max di 125Vcc) ne stabiliscono le caratteristiche elettriche.
In fine la temperatura a cui può funzionare (es. da –25 a +80 °C), caratterizza l’ambiente in cui può funzionare.
I dati forniti si riferiscono a finecorsa di tipo comune; ovviamente esistono anche tipi speciali, sono caratteristiche particolari ed adatte ad utilizzi specifici. Per quanto riguarda gli interruttori di prossimità (proximity), possiamo definirli come elementi di commutazione che operano senza intervento meccanico e senza alcun contatto fisico.
I tipi più diffusi, possono essere ad induzione o capacitivi.
I primi sono trasduttori elettronici che forniscono segnali in uscita quando un metallo qualunque entra nella zona di sensibilità. Il principio di funzionamento è del tipo dei trasduttori ad induzione; possiamo comunque pensarli costituiti da un oscillatore alloggiato nella testa degli stessi, che genera un campo alternato ad alta frequenza, in uscita sull’area di sensibilità sotto forma di campo di dispersione. La presenza di un elemento metallico in questo campo di dispersione, attenua il circuito oscillante; tale variazione di segnale è utilizzata nello stadio trigger che comanda lo stadio di potenza.
E così possibile comandare direttamente dei relè, dei contatori di impulsi, ecc.
Questi dispositivi presentano rispetto ai microinterruttori, una più lunga durata, una precisione maggiore di commutazione, impermeabilità ai liquidi, alle polveri e una frequenza di intervento elevata.
I sensori capacitivi forniscono dei segnali in uscita quando un elemento di qualsiasi materiale entra nella zona di sensibilità. Sono trasduttori che operano in base sl principio della variazione del dielettrico esistente tra le armature: un elettrodo compie l'importante funzione di convertire l'avvicinamento di un oggetto in variazione elettriche. Un circuito oscillatore converte tali variazioni in segnali di frequenza ed ampiezza variabili, all'avvicinarsi e all'allontanarsi dell'oggetto da rilevare. Un ulteriore circuito converte i segnali alternati in segnali continui, utilizzabili poi nello stadio che comanda quello di potenza.
![]() Telecomunicazioni,
Elettronica e applicazioni
Telecomunicazioni,
Elettronica e applicazioni
Interfacciamento parallelo
La tecnica di interfacciamento parallelo consiste nel trasferimento contemporaneo dei bit, di solito otto, che costituiscono un carattere; i caratteri, o byte, del messaggio vengono a loro volta trasferiti in modo seriale. Oltre a consentire velocità di trasmissione superiori a quelli ottenibili con la comunicazione seriale, essa offre il vantaggio di una maggiore semplicità e versabilità nella gestione del colloquio fra apparecchiature di tipo digitale, anche se la distanza del collegamento deve essere in genere molto limitata.
L’interfacciamento parallelo trova la sua applicazione principale nei sistemi di misura automatici. L’impiego di un sistema automatico invece di un insieme di strumenti manovrati manualmente offre migliori prestazioni rispetto a precisione e ripetibilità e numerosi vantaggi, fra cui la possibilità di effettuare in tempo reale un’analisi statistica dei dati rilevati e quindi la compensazione degli errori sistematici.
Per realizzare il collegamento di diversi strumenti di misura ad una o più apparecchiature di elaborazione o a dispositivi di memorizzazione o visualizzazione, con la possibilità di variare la configurazione del sistema, si è resa necessaria la definizione di interfaccia normalizzata; tra queste la più diffusa è la IEEE-488.
Nel campo del controllo di processo merita ancora di essere citata l’interfaccia IEEE-583/CAMAC, in cui lo scambio dati avviene con il parallelismo 24 (trasferimento simultaneo di 24 bit) e che consente velocità di trasmisione molto elevata.
Interfaccia IEEE-488
Sviluppata come interfaccia per strumentazione da una delle maggiori case costruttrici di apparecchiature di misura che la denominò HP-IB (Hewlett-Packard Interface Bus), è stata successivamente approvata dalla’IEEE ( Institute of Electronic Engineers) con la denominazione IEEE-488. Questo standard è oggi applicato ad un grande numero di sistemi digitali diversi, quali memoria di massa, stampanti, plotter, elaboratori oltre a strumenti di misura, tanto che esso è sovente indicato con l’acronimo GPIB (General Purpose Interface Bus).
L’interfaccia IEEE-488 prevede 16 linee che costituiscono il bus; ad esso possono essere collegate N apparecchiature (device) anche diverse purché compatibili con questo standard. Lo scambio dei dati, codificati di solito in codice ASCII e trasferiti in forma bit parallello- byte seriale, avviene secondo un protocollo rigidamente definito (handshake) che stabilisce la sequenzialità e le modalità del coloquio fra i vari dispositivi collegati. Il sistema di comunicazione definisce gerarchicamente le apparecchiature collegate in base alle funzioni svolte, che sono essenzialmente le seguenti:
| taker , riferita ad un dispositivo predisposto per inviare messaggi sul bus; |
| listener, riferita ad un’apparecchio predisposta per ricevere messaggi; |
| controller, riferita all’apparecchiatura designata per inizializzare o variare la configurazione del sistema. |
Un’ apparecchiatura non deve necessariamente essere collegata a tutte le linee: sono indispensabili sono quelle dei dati e quelle di handshake, mentre per le linee di controllo la scelta spetta al progettista che decide in base alla struttura del sistema, alle esigenze previste e alle potenzialità di ciascuna apparecchiatura.
Per efffettuare l’inizializzazione e la programmazione delle apparecchiature collegate con interfaccia IEEE-488 o per inviare comandi ad esse è prevista una serie di messaggi in codice. Essi vengono inviati sul bus dati e contemporaneamente viene attivata la linea di controllo ATN (Attention); con ciò il messaggio è corettamente interpretato come un comando.
Per quanto riquarda le specifiche elettriche relative allo standard IEEE-488 si può osservare che la corrispondenza fra stati logici e livelli elettrici è definito in logica negativa e che i livelli di tensione e corrente sono quelli TTL. Pertanto lo stato logico 0 corrisponde a una tensione compresa fra 2 e 5 V mentre lo stato logico 1 è rappresentato da una tensione inferiore a 0,8V. I line driver utilizzati sono generalmente di tipo tri-state; fanno eccezione alcune linee che per la loro specifica funzionalità devono essere connesse in or-cablato e presentano pertanto l’uscita a collettore aperto. Infine sono di solito realizzati con ingresso a trigger di Schmit al fine di ottenere una maggiore immunita ai disturbi. Il massimo data rate ammesso di 1 Mbyte /s richiede ad esempio che il cavo sia di lunghezza inferiore a 15 m con un carico ogni metro e che tutte le apparecchiature collegate siano accese.
![]() Inglese
Inglese
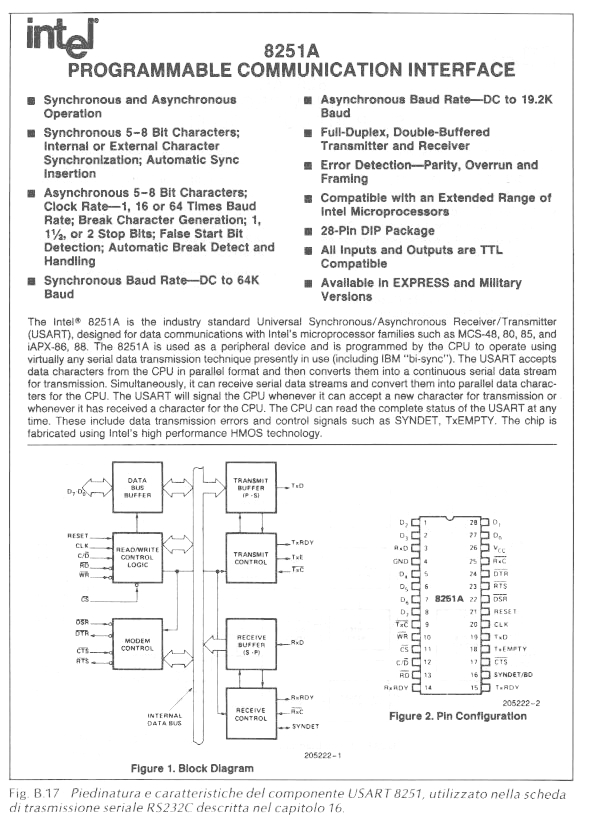
Segmento di data sheet
PROGRAMMABLE COMMUNICATION INTERFACE
The Intelâ 8251A is the industry standard Universal Synchronous/Asynchronous Receiver/transmitter (USART), designed for data communications with intel’s micropocessor families such as MCS-48,80,85, and IAPX-86,88. The 8251A is used as a peripheral device and is programmed by the CPU to operate using virtually any serial data transmission technique presently in use (including IBM "bi-sync"). The USART accepts data characters from the CPU in parallel format and then converts them into a continuous serial data steam for transmission. Simultaneously, it can receive serial data streams and convert them into parallel data characters for the CPU. The USART will signal the CPU whenever it can accept a new character for transmission or whenever it has received a character for the CPU. The CPU can read the complete status of the USART at any time. These include data transmission errors and control signals such as SYNDET, TxEMPTY. The chip is fabricated using intel’s high performance HMOS tecnology.
Traduzione
L’intel 8251A è ricevitore/trasmettitore sincrono-asincrono universale industriale standard (USART), progettato per la comunicazione dei dati con le famiglie del micro processore Intel come MCS-48,80,85, e IAPX-86,88. L’8251A è usato come una periferica ed è programmato dalla CPU per operare usando virtualmente qualsiasi tecnica di trasmissione dei dati in serie attualmente, incluso IBM "by-sync". L’USART accetta i caratteri dei dati della CPU in formato parallelo e poi li converte in un flusso continuo di dati in serie per la trasmissione. Simultaneamente può ricevere dei flussi dei dati di serie e convertirli in caratteri di dati in parallelo per la CPU. L’USART segnalerà alla CPU quando può accettare un nuovo carattere per la trasmissione o quando ha ricevuto un carattere per la CPU. La CPU può leggere lo status completo dall’USART in qualsiasi momento. Questi includono gli errori di trasmissione dei dati, e i segnali di controllo come SYNDET, TxEMPTY. Il chip è fabbricato usando tecnologia HMOS ad alta prestazione di INTEL.
![]() Matematica
Matematica
Caratteristica di trasferimento di un trasduttore
Si definisce caratteristica di trasferimento di un trasduttore la relazione matematica esistente tra la grandezza d’uscita e quella d’ingresso.
Se si riporta su un piano cartesiano la grandezza d’uscita in funzione di quella d’ingresso si ottiene un grafico che rappresenta, appunto, la caratteristica di trasferimento
Se la caratteristica di trasferimento di un trasduttore di precisione è lineare, allora la variazione della grandezza d’uscita (variabile dipendente) è direttamente proporzionale a quella d’ingresso (variabile indipendente).
In generale però la caratteristica non è lineare e può non passare per l’origine.
Se la caratteristica presenta linearità solo in una ristretta fascia di valori, è opportuno utilizzare il trasduttore solo nel range che risulta lineare, anche se si riduce il campo di lavoro.
L’equazione matematica che rappresenta la caratteristica di un trasduttore lineare deve essere del tipo y=m*x se la retta passa per l’origine, o del tipo y=m*x+k se la retta non passa per l’origine ed interseca l’asse y nel punto di coordinate P(X=0, Y=K).

grafico della retta y=x
(m=1 k=0) realizzato con ![]()

grafico della retta y=x
+12 (m=1 e k=12) realizzato con ![]()
La linearità è il parametro del trasduttore che evidenzia l’errore (o deviazione) tra la caratteristica ideale teorica (funzione lineare) e la reale curva di trasferimento del trasduttore. La deviazione è calcolata rispetto alla retta di equazione y = m*x + k che meglio approssima la caratteristica reale del trasduttore.
-
![]()