![]()
 Docente: Prof. Mauro De Berardis
Docente: Prof. Mauro De Berardis
Lavori eseguiti dagli alunni della classe Quinta B TIEN IPSIA Teramo
Coordinamento: Prof. Mauro De Berardis, Prof. Loreto Giovannucci
Trasduttori di temperatura 
![]()
![]()
Lavoro eseguito dall'alunno Alessandro Leodori

![]()
![]()
Generalità sui trasduttori

I trasduttori sono dispositivi che trasformano una grandezza fisica in una grandezza di un altro tipo, generalmente elettrica per poterla misurare o per poterla confrontare con una grandezza della stessa natura. In genere un sistema di misura è costituito da un primo trasduttore d’ingresso che trasforma la grandezza che si vuole misurare in una grandezza d’altro tipo generalmente elettrica. Successivamente è presente un secondo blocco modificatore che amplifica o varia una qualche caratteristica del segnale d’uscita del primo trasduttore affinchè esso costituisca l’ingresso di un secondo trasduttore che lo converta in modo da avere un segnale facilmente leggibile.
Le principali caratteristiche di un trasduttore si possono classificare nel seguente modo:
| Campo di funzionamento: è l’intervallo di valori che il trasduttore può accettare conservandone le caratteristiche di precisione senza che esso sia danneggiato. | |
| Risoluzione o potere risolutivo: in un trasduttore l’uscita non varia mai con continuità ma presenta sempre una discontinuità, tra un valore e il successivo. Quindi si ha un andamento a gradino perciò si verifica che a due valori d’ingresso diversi, corrisponde una stessa uscita. | |
| Precisione dello strumento: è il massimo errore assoluto che si ha nel campo di misura e il massimo valore misurabile. | |
| Linearità: un trasduttore si definisce lineare quando la curva rappresentante il legame tra ingresso ed uscita è una retta. | |
| Sensibilità: viene definita come sensibilità il rapporto tra la variazione della grandezza in uscita e la variazione della grandezza in ingresso: S=D u/D i. | |
| Tempo di risposta: si definisce come tempo di risposta il tempo necessario affinchè l’uscita raggiunga, senza oscillazioni, un valore pari al 90% del valore a regime. | |
| Vita di un trasduttore: è il tempo oltre il quale non è più garantito il corretto funzionamento del trasduttore |
Trasduttori di temperatura
La scelta del sensore è definita dalle esigenze applicative specifiche e principalmente dall’intervallo di temperatura da misurare.
In tabella sono riportati i tipi di sensori più comuni con le temperature minime e massime di lavoro.
| Tipo di sensore | Campo di temperature (°C) |
| Bimetallico | - 50 ¸ + 500 |
| A semiconduttore | - 55 ¸ + 150 |
| Termistore | - 80 ¸ + 150 |
| Termocoppia | - 250 ¸ + 2000 |
| Termoresistenza | - 200 ¸ + 850 |
Interruttore termico bimetallico
E’ il trasduttore più elementare utilizzato come elemento sensore in semplici sistemi di controllo di tipo on-off quali i sistemi di riscaldamento, ventilazione, ecc. Essendo costituito da una lamina bimetallica flessibile, i diversi allungamenti delle due lamine, dovuti ai diversi coefficienti termici dei due materiali, fanno si che la lamina si fletta in funzione della temperatura fino ad agire su un interruttore quando la temperatura raggiunge il valore previsto.
Termocoppie
Le terrmocoppie sono forse i sensori più diffusi, nonostante il basso valore del segnale di uscita e la linearità non sempre soddisfacente, specialmente se sono impiegate per ampi intervalli di temperatura; presentano infatti diversi pregi fra cui un costo ridotto e una buona resistenza alle sollecitazioni dell’ambiente; la varietà di tipi disponibili copre inoltre un’ampia fascia di temperatura di lavoro. Il loro principio di funzionamento si basa sull’effetto Seebeck: due conduttori metallici diversi A e B uniti alle due estremità sono percorsi da una corrente proporzionale alla differenza di temperatura fra una giunzione, detta giunzione calda (Jh: hot jiunction), e l’altra, detta giunzione fredda (Jc: cold jiuncton). Se si considerano i due conduttori scollegati, ad esempio in corrispondenza della giunzione fredda, fra i terminali scollegati si manifesta una f.e.m. E proporzionale alla differenza di temperatura Th-Tc. Se la giunzione fredda è mantenuta a Tc = 0 °C, la f.e.m. risulta proporzionale a Th.

TIPO (UNI 7938) |
Elementi +/- |
Campo di temperature (°C) |
E |
Cromel/Costantana |
0 ¸ 900 |
J |
Ferro /Costantana |
-200 ¸ 700 |
K |
Cromel/Alumel |
-200 ¸ 1200 |
R,S |
Platino-Rodio/Platino |
0 ¸ 1400 |
T |
Rame/Costantana |
-200 ¸ 350 |
C |
Tungsteno/Renio |
0 ¸ 2000 |
| Costantana (Cu + Ni), Alumel (Ni + Al), Cromel (Ni + Cr) | ||
Tab. 2 – Termocoppie e dati relativi
A seconda delle condizioni ambientali e delle temperature da rilevare, vengono utilizzate diverse combinazioni di metalli, a cui corrispondono le curve di trasferimento ideali .
Per ottenere misure di temperatura precise occorre compensare l’errore dovuto al collegamento dei terminali di uscita della termocoppia con i conduttori, generalmente in rame, (si creano altre due giunzioni e quindi due f.e.m.) e occorre disporre di una temperatura di riferimento stabile a °C, cosa decisamente poco pratica.
Poiché la giunzione fredda è posta ad una temperatura Ta > 0 °C, la tensione di uscita della termocoppia presenta un errore e precisamente risulta inferiore al valore desiderato proporzionale a Tx.
Nel blocco isotermico comprendente la giunzione fredda, viene allora inserita una resistenza R, variabile con la temperatura, che viene a costituire un ramo di un ponte di Wheatstone equilibrato a 0 °C. Essendo come si è detto Ta > 0 °C, si crea una tensione di sbilanciamento del ponte che viene a sommarsi al segnale fornito dalla termocoppia, compensandone l’errore.
In commercio sono disponibili integrati specifici che contengono il blocco di compensazione e un amplificatore del segnale di uscita (ad esempio l’integrato AD 594 per termocoppie di tipo J e K ).



termocoppie di tipo K
Termoresistenze.
Le termoresistenze (RTD: resistance temperature detector) si basano sulla proprietà per cui la resistenza elettrica dei metalli aumenta con la temperatura secondo la relazione approssimata
RT = Ro (1 + a oT )
dove RT è la resistenza alla temperatura T (°C) ed Ro è la resistenza a 0 °C. Le prestazioni migliori sono offerte dalle termoresistenze al platino che presentano un coefficiente di temperatura a o = 3,85 * 10 –3 a 0 °C e vengono usate per temperature da – 200 a 850 °C. I dispositivi RTD presentano valori di resistenza tipici, a 25 °C, compresi fra 20W e 2 kW ; il loro impiego per misure di temperatura richiede l’inserimento in una struttura a ponte.
Termistori.
Sono resistori che presentano un elevato coefficiente di temperatura, negativo per i termistori NTC e positivo per i PTC.
I dispositivi NTC sono largamente impiegati, in una gamma di temperature che si estende da – 100 °C fino a 450 °C, per l’elevata sensibilità e i ridotti tempi di risposta. La curva di trasferimento ha andamento esponenziale ed è quindi facilmente linearizzabile.
In commercio sono anche disponibili termistori composti o linearizzati costituiti da due termistori incapsulati in un unico contenitore; essi sono previsti per l’inserimento in opportune reti resistive consigliate (e talvolta fornite) dal costruttore al fine di ottenere una risposta lineare.



Vari tipi di termistori
![]() Elettronica, Telecomunicazioni e applicazioni
Elettronica, Telecomunicazioni e applicazioni
Spesso durante la trattazione degli argomenti di Elettronica o di Sistemi, abbiamo sentito la parola "rumore".
IL RUMORE
Questa terminologia è sempre stata abbinata all’esistenza di un "segnale elettrico indesiderato" sovraposto al segnale utile, e capace di "deformare" la forma d’onda del segnale stesso.
E’ evidente, e comunque lo si è già detto più volte, il "fastidio" che questo segnale spurio può provocare alla trasmissione, infatti la deformazione del segnale utile può essere interpretato, all’atto della ricezione, come un nuovo segnale di significato ampiamente diverso.
Tanto per fare un esempio nel campo della radiotrasmissione il rumore può essere causa di fluscii o disturbi, tali da impedire una ricezione "pulita" e fedele del segnale trasmesso; in trasmissione dati, esso può causare "variazioni" nella sequenza di bit, tali da determinare una ricezione completamente falsa.
È evidente quindi che il rumore, proprio perché "ineliminabile" in maniera tale, è una causa di "limitazione" nell’efficienza di una trasmissione, in termini di velocità nel caso della trasmissione dati, od in termini di fedeltà nel caso della radiotrasmissione. Le cause per cui esiste il rumore possono essere molteplici e svariate ma, volendo semplificare lo studio, possiamo dire che esse sono prevalentemente imputabili ai seguenti motivi:
- Imperfezioni costruttive o tecnologiche nelle apparecchiature elettroniche che concorrono alla formazione dei sistemi trasmissivi nel loro complesso.
- Imperfezioni costruttive o tecnologiche dei mezzi trasmissivi preposti per la realizzazione del "collegamento" necessario per poter trasferire le informazioni tra le due o più stazioni trasmittenti/riceventi.
- Imperfezioni nei "materiali" utilizzati per la realizzazione di tutto il complesso trasmissivo.
Senza scendere eccessivamente nei particolari, ed indipendentemente dai motivi (visti sopra) che lo hanno creato, possiamo dire che il rumore può essere dovuto principalmente alle seguenti cause:
- Rumore termico (detto anche "effetto Jonson"), caratteristico di tutti i materiali sia conduttori che semiconduttori.
- Residui nell’alimentazione continua in quanto ricavata da una tensione alternata (meglio noti come "ripple").
- Intermodulazione, caratteristica di una amplificazione non perfettamente lineare su segnali complessi, dove le singole armoniche (in cui può essere scomposto il segnale complesso, tramite teorema di Fourier) subiscono "amplificazioni differenziate", dando quindi origine a fenomeni di deformazione del segnale utile.
- Transitori di chiamata e di commutazione, tipico inconveniente delle linee telefoniche commutate.
- Induzione elettrica tra due conduttori attraversati da corrente e vicini tra di loro, od a causa della presenza di linee di trasporto per l’energia elettrica.
- Scariche elettriche provocate dai fenomeni atmosferici (temporali, ecc.) o da altre cause (scintillio di una candela, o delle spazzole di un motore elettrico,ecc.).
Tutte le cause appena viste danno quindi origine ad un "segnale elettrico indesiderato", la cui intensità e forma d’onda dipendono dal motivo che hanno generato questo rumore; in tutti i casi questo segnale elettrico può essere "considerato", ai fini della progettazione di un sistema trasmissivo, in due modi possibili:
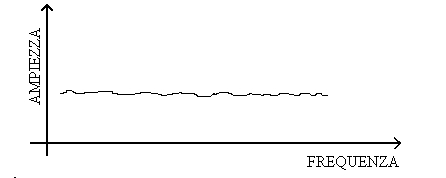
| Come "rumore di fondo" (detto anche "rumore bianco") | |
| Come "rumore impulsivo" |
Nel primo caso il rumore è caratterizzato da trutta una serie di componenti casuali che danno origine ad un segnale la cui forma d’onda e rappresentata in figura.
Nel secondo caso invece, il rumore e caratterizzato da "picchi" sporadici e di breve durata, come rappresentato in figura.

Risulta abbastanza intuitiva la notevole differenza, dal punto dui vista tecnico, tra questi due segnali; infatti il primo risulta "ricco" di frequenze in quanto qualunque azione di "filtraggio" produrebbe sicuramente l’eliminazione anche di qualche frequenza utile, il secondo invece possiede poche frequenze in un campo limitato, ciò che consente una più facile progettazione del filtro.
Vista l’importanza che riveste il rumore(si ricorda per esempio che, nella trasmissione dati, la velocità trasmissiva risulta condizionata dal rapporto S/R = Segnale/Rumore), ai fini di una corretta progettazione di un sistema di trasmissione è importante conoscerlo e quindi poterlo misurare;ebbene proprio per questo le norme CCITT intervengono per regolamentare sia le "modalità " con cui devono essere eseguite queste misure, che i valori "limite" entro i quali il rumore può essere definito accettabile.
Dunque il parametro che tiene conto del "livello" del rumore rispetto al segnale utile è il già citato "rapporto S/R" (detto anche S/N=Signal/Noise in inglese), espresso come rapporto tra la potenza del segnale utile e la potenza del rumore.
Il rumore viene misurato in dB = decibel.
![]() Matematica
Matematica
Caratteristica di trasferimento di un trasduttore
Si definisce caratteristica di trasferimento di un trasduttore la relazione matematica esistente tra la grandezza d’uscita e quella d’ingresso.
Se si riporta su un piano cartesiano la grandezza d’uscita in funzione di quella d’ingresso si ottiene un grafico che rappresenta, appunto, la caratteristica di trasferimento
Se la caratteristica di trasferimento di un trasduttore di precisione è lineare, allora la variazione della grandezza d’uscita (variabile dipendente) è direttamente proporzionale a quella d’ingresso (variabile indipendente).
In generale però la caratteristica non è lineare e può non passare per l’origine.
Se la caratteristica presenta linearità solo in una ristretta fascia di valori, è opportuno utilizzare il trasduttore solo nel range che risulta lineare, anche se si riduce il campo di lavoro.
L’equazione matematica che rappresenta la caratteristica di un trasduttore lineare deve essere del tipo y=m*x se la retta passa per l’origine, o del tipo y=m*x+k se la retta non passa per l’origine ed interseca l’asse y nel punto di coordinate P(X=0, Y=K).

grafico della retta y=x
(m=1 k=0) realizzato con ![]()

grafico della retta y=x
+12 (m=1 e k=12) realizzato con ![]()
La linearità è il parametro del trasduttore che evidenzia l’errore (o deviazione) tra la caratteristica ideale teorica (funzione lineare) e la reale curva di trasferimento del trasduttore. La deviazione è calcolata rispetto alla retta di equazione y = m*x + k che meglio approssima la caratteristica reale del trasduttore.
![]() Inglese
Inglese

FEATURES
| Linear Current Output: 1m A/K | |
| Wide Range: -55° C to +150° C | |
| Probe Compatible Ceramic Sensor Package | |
| Two-Terminal Device: Voltage In/Current Out | |
| Laser Trimmed to +/- 0.5° C Calibration Accuracy (AD590M) | |
| Excellent Linearity: to +/- 0.3° C Over Full Range (AD590M) | |
| Wide Power Supply Range: +4V to +30V | |
| Sensor lsolation from Case |
PRODUCT DESCRIPTION
The AD590 is a two-terminal integrated circuit temperature transducer which produces an output current proportional to absolute temperature. For supply voltages between +4V and +30V the device acts as a high impedance, constant currem regulator passing 1m A/K. Laser trimming of the chip's thin film resistors is used to calibrate the device to 298.2m A output at 298.2K (+25° C).
The AD590 should be used in any temperature sensing application below +150° C in which conventional electrical temperature sensors are currently employed. The inherent low cost of a monolithic integrated circuit combined with the elimination of support circuitry makes the AD590 an attractive alternative for many temperature measurement situations. Linearization circuitry, precision voltage amplifiers, resistance measuring circuitry and cold junction compensation are not needed in applying the AD590.
Traduzione
Caratteristiche
Corrente lineare d’uscita: 1m A/K
Ampia portata: -55 °C +150 °C
Sonda compatibile con l’imballaggio di ceramica del sensore
Progetto a due terminali: Voltaggio In/corrente di uscita
Laser stabilizzato a +/-0,5 °C precisione di stabilizzazione(AD 590 M)
Linearità eccellente: a +/- 0,3 °C sopra la portata massima(AD 590 M)
Ampia possibiità della portata di riserva: da +4V a +30V
Isolamento del sensore dal caso
Descrizione
L’AD 590 è un trasduttore di temperatura circuito integrato a due terminali che produce una corrente proporzionale alla temperatura assoluta. Per la tensione di riserva tra +4V e +30V il progetto agisce come un’alta impedenza, passaggio regolatore di corrente costante 1m A/K. La guarnizione laser del chip è un resistore di pellicola fina usato per bilanciare il progetto a 298,2m A in uscita a 298,2K(+25 °C).
L’AD 590 può essere usato in qualche applicazione per il rilevamento di temperatura sotto a +150 °C nella quale i sensori di temperatura elettrica convenzionale sono comunemente utilizzati. Il costo relativo ad un circuito integrato monolitico combinato con l’eliminazione del circuito di supporto fa dell’AD 590 una conveniente alternativa per molte situazioni di misura di temperatura. Circuito di linearizzazione, amplificatori di tensione di precisione, circuito per misurare la resistenza e la compensazione con la giunzione fredda non hanno bisogno di applicare l’AD 590.
![]()

![]()